

Unmanned aerial vehicle intelligent airway planning test method based on metamorphic test technology
A technology of route planning and metamorphosis testing, applied in the direction of navigation calculation tools, etc., can solve few problems such as algorithm correctness and reliability form analysis, and algorithm cannot output the optimal global path, etc., to achieve the realization of automatic process and highly automated process Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
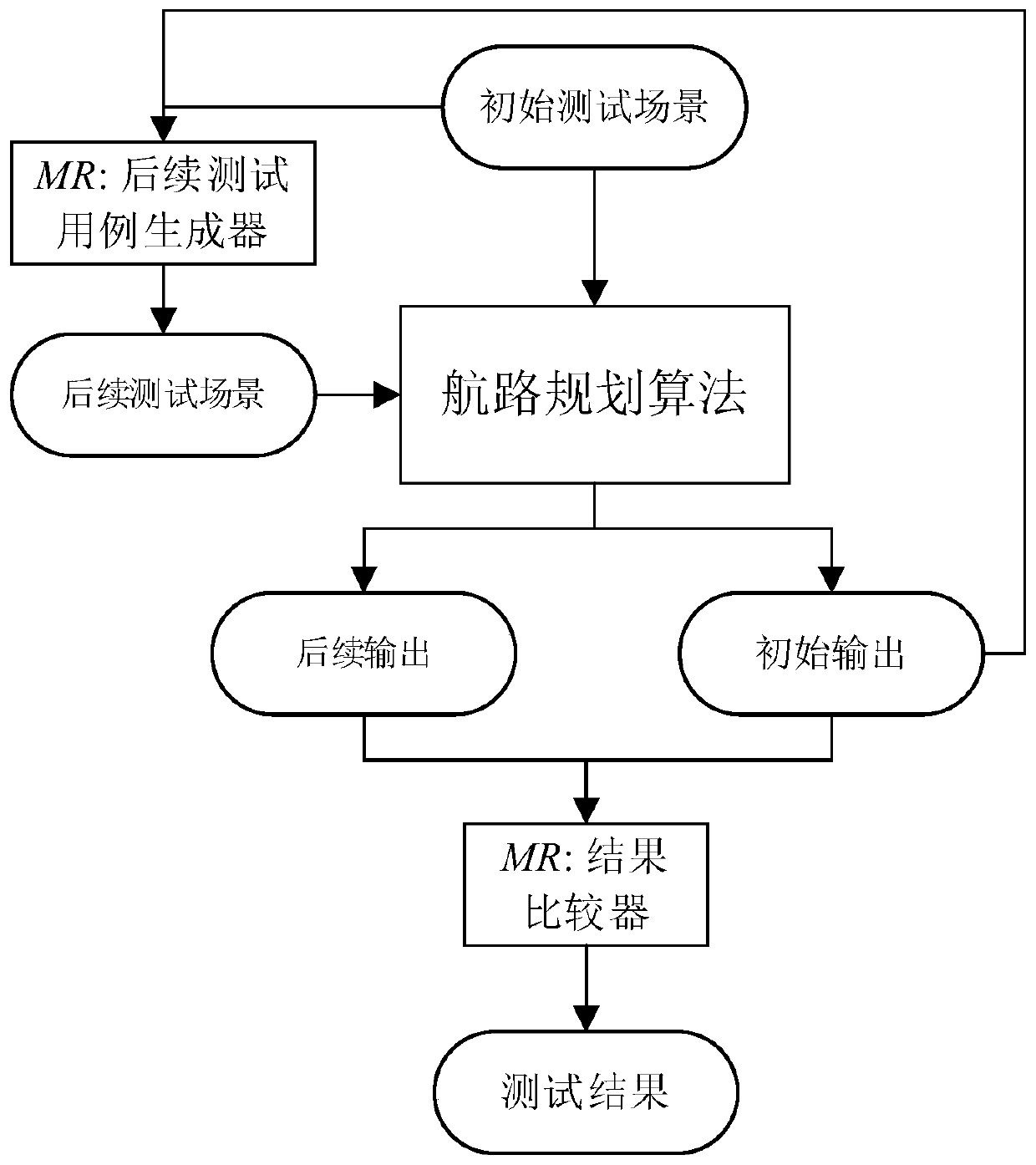
[0049] Refer below figure 2 , image 3 , Figure 4 ,and Figure 5 , the test method of UAV intelligent route planning algorithm based on metamorphosis test technology is described in detail:
[0050] Step 1: Define the metamorphic relationship
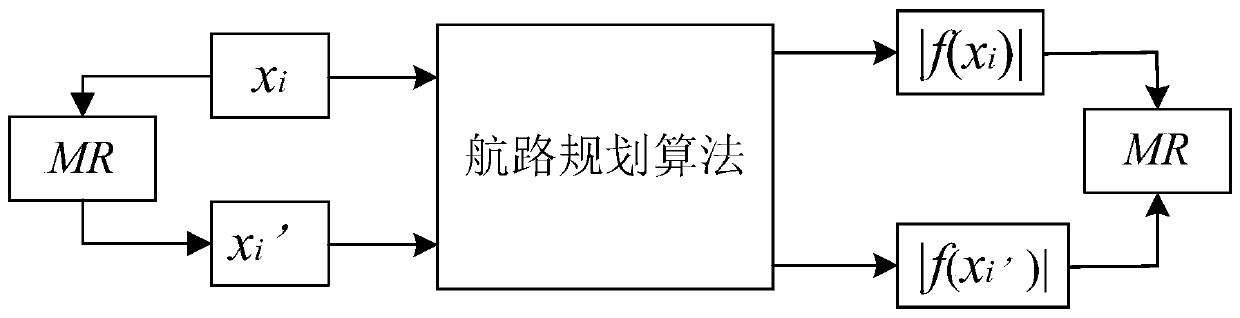
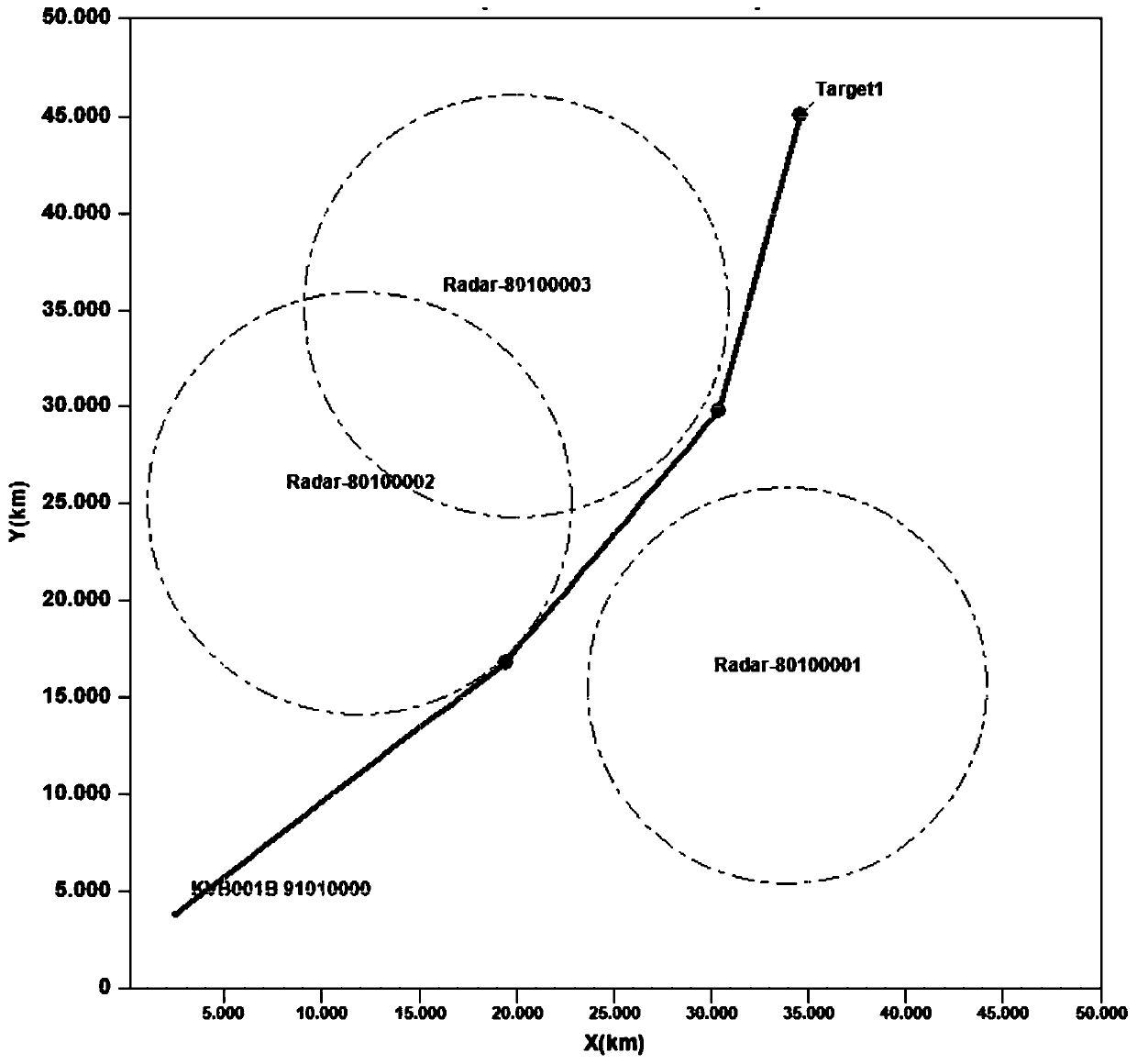
[0051] S1.1 takes the length of the optimal path (|f(S, Env, T)|) as the center defining all metamorphic relations, which means that all metamorphic relations should be related to it; according to this center, the UAV route The planning test scenario is divided into three parts, namely the starting coordinate point S, the task target point T and the flight environment Env, and the attributes of each part are extracted, such as Figure 4 As shown, both S and T have two attributes of coordinates and quantities, while Env has a radius attribute in addition to coordinates and quantities. In this way, a metamorphic feature operation can be defined for each part, namely O-S, O-T and O-Env. Similarly, the attributes of each part can be ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More