

Map model construction method and map model construction system based on coordinate transformation
A map model and coordinate transformation technology, applied in theodolites, road network navigators, etc., to solve problems such as inaccurate positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
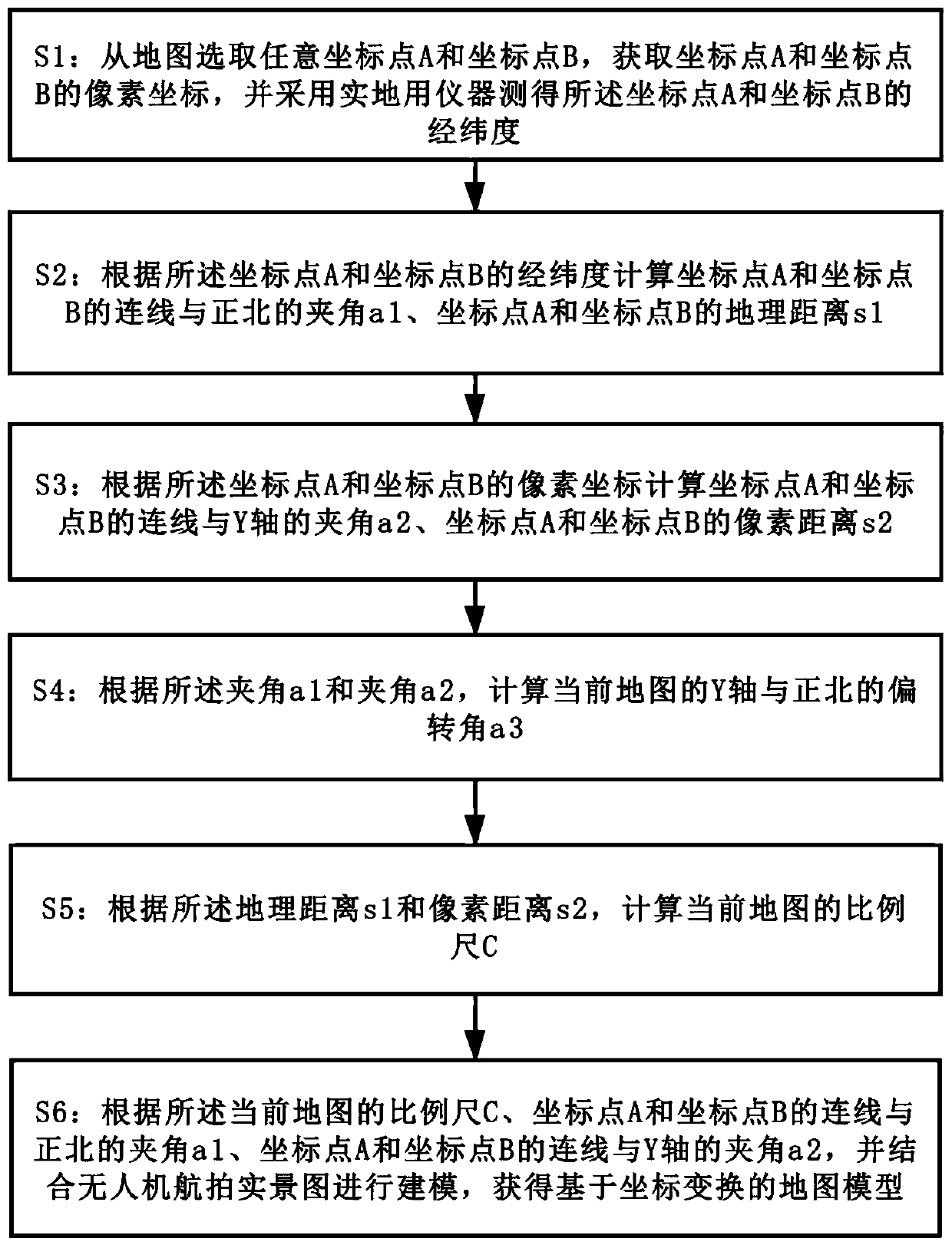
[0081] In this embodiment, a method for constructing a map model based on coordinate transformation is proposed, such as figure 1 As shown in FIG. 1 , they are respectively a flow chart of a method for constructing a map model based on coordinate transformation in this embodiment.
[0082] A method for constructing a map model based on coordinate transformation proposed in this embodiment includes the following steps:
[0083] S1: Select any coordinate point A and coordinate point B from the map, obtain the pixel coordinates of coordinate point A and coordinate point B, and measure the longitude and latitude of coordinate point A and coordinate point B with field instruments, where the longitude and latitude of coordinate point A is (lonA,latA), the latitude and longitude of coordinate point B is (lonB,latB).
[0084] S2: According to the longitude and latitude of coordinate point A and coordinate point B, calculate the angle a1 between the line connecting coordinate point A ...
Embodiment 2
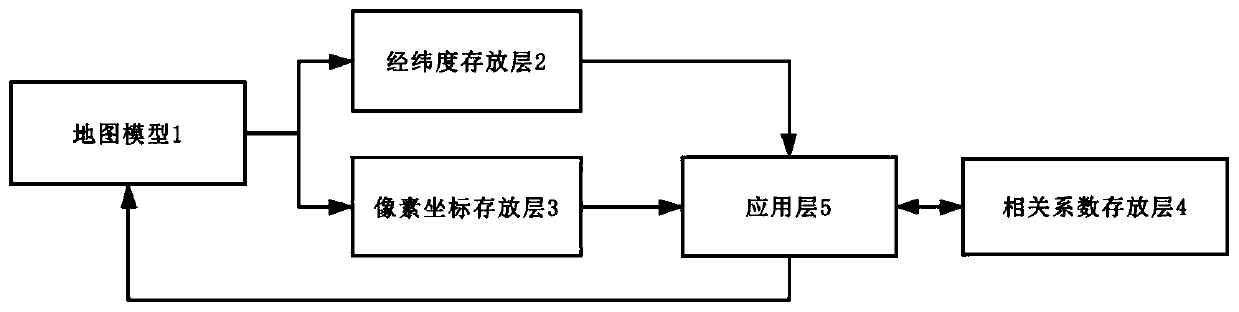
[0129] This embodiment proposes a coordinate transformation-based map model construction system, which is applied to a coordinate transformation-based map model construction method proposed in Embodiment 1. Such as image 3 Shown is a schematic structural diagram of the coordinate transformation-based map model construction system of this embodiment.
[0130] In the map model construction system based on coordinate transformation proposed in this embodiment, it includes a map model 1 constructed from a real scene picture taken by an unmanned aerial vehicle, a latitude and longitude storage layer 2, a pixel coordinate storage layer 3, a correlation coefficient storage layer 4, and an application layer 5. in:
[0131] The latitude and longitude storage layer 2 is connected with the map model 1, and is used to store the latitude and longitude of each coordinate point in the map model 1;
[0132] The pixel coordinate storage layer 3 is connected to the map model 1 for storing th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More