

Robot path planning method and system based on skeleton extraction of passable area
A technology for extracting traffic areas and skeletons, which is applied to instruments, road network navigators, navigation, etc., can solve the problems of path planning failure, easy to block narrow passages, etc., and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
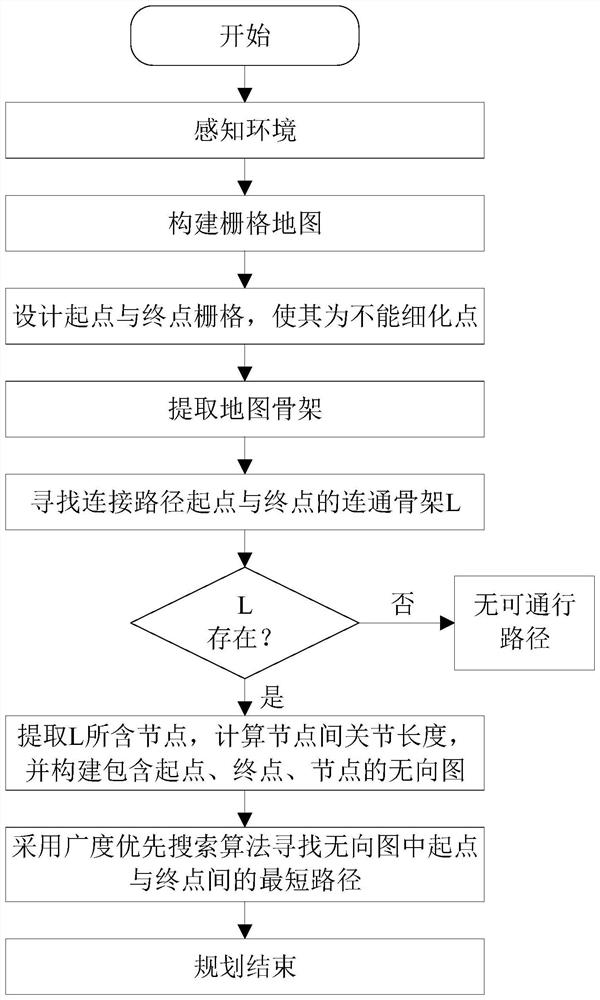
[0051] like figure 1 As shown, Embodiment 1 of the present disclosure provides a robot path planning method based on skeleton extraction of a passable area, and the steps are as follows:
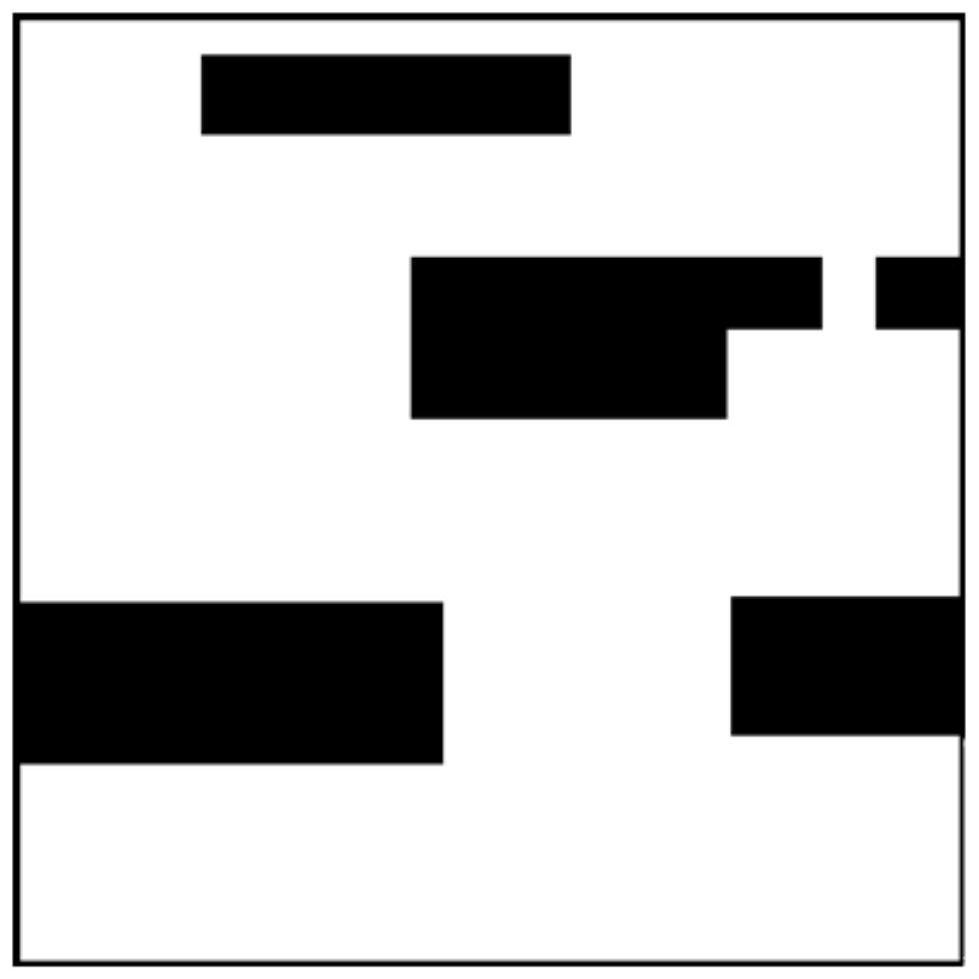
[0052] Construct the environmental grid map, and then project the robot's initial position, obstacles and target positions into the grid map according to the environmental information;
[0053] Determine the passable area of the robot in the grid map, and then use the Zhang-Suen algorithm to extract the skeleton of the passable area;
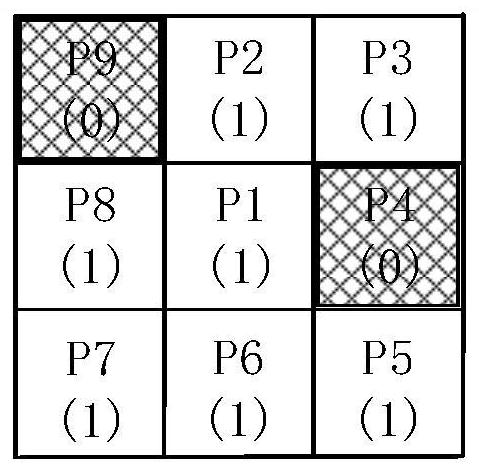
[0054] Locate the starting point and ending point of the path on the grid map, and design its eight-neighborhood grid state, so that the grid where the starting point and ending point of the path are located can be reserved as a skeleton point during the refinement of the passable area;
[0055] Use the breadth-first search algorithm to find the shortest connected skeleton connecting the starting point and the ending point of the path, and obtain the shorte...
Embodiment 2
[0081] Embodiment 2 of the present disclosure provides a robot path planning system based on skeleton extraction of a passable area, including:
[0082] The grid map construction module is configured to: construct an environmental grid map, and then project the robot's initial position, obstacles, and target positions into the grid map according to the environmental information;
[0083] The skeleton extraction module is configured to: determine the passable area of the robot in the grid map, and then use the Zhang-Suen algorithm to extract the skeleton of the passable area;
[0084] The skeleton optimization module is configured to: locate the starting point and ending point of the path on the grid map, and design the eight-neighborhood grid state, so that the grid where the starting point and ending point of the path are located can be used as the skeleton point in the refinement process of the passable area. reserve;
[0085] The shortest path acquisition module is confi...
Embodiment 3
[0090] Embodiment 3 of the present disclosure provides a computer-readable storage medium, on which a program is stored. When the program is executed by a processor, the robot path planning method based on skeleton extraction of a passable area as described in Embodiment 1 of the present disclosure is implemented. A step of.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More