

An Active Anti-jamming Tracking Control Method for Quadrotor UAV Circular Trajectory
A four-rotor UAV and tracking control technology, applied in the field of flight control, can solve problems such as harsh interference assumptions and restrict engineering applications, and achieve the effects of reducing adjustment difficulty, improving tracking accuracy and broad application prospects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
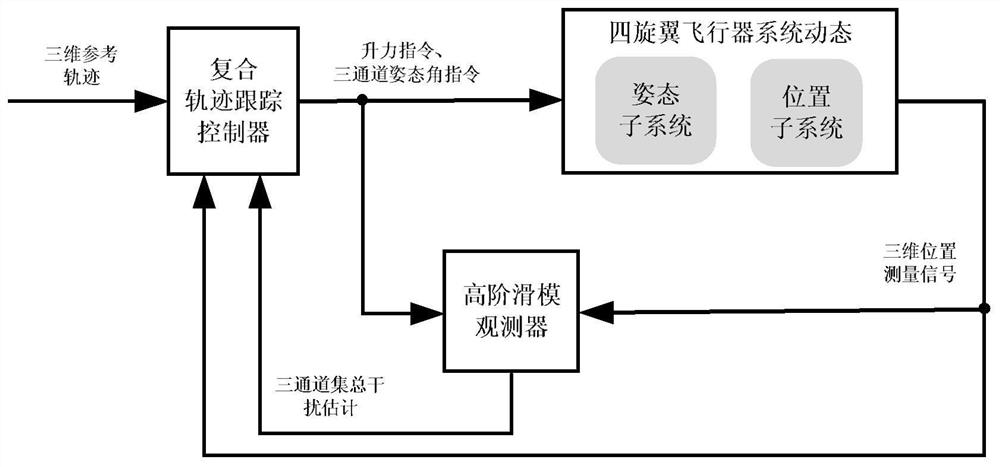
[0060] The present invention designs an active anti-jamming tracking control method for a circular track of a four-rotor UAV, such as figure 1 As shown, the basic steps are as follows:
[0061] Step 1: Establish the position system model of the quadrotor UAV, and transform the trajectory tracking problem of the quadrotor UAV into the stabilization problem of the tracking error of the position loop;
[0062] Step 2: Introduce virtual control variables and establish a high-order sliding mode disturbance observer for the position subsystem of the quadrotor UAV;
[0063] Step 3: Establish a composite nonlinear dynamic inverse controller for the quadrotor UAV to ensure that the position system of the disturbed quadrotor UAV dynamically and progressively track its reference trajectory;
[0064] Step 4: Transform the virtual control quantity int...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More