

Method for carrying out system identification on two-degree-of-freedom flexible leg based on BP neural network algorithm
A BP neural network and system identification technology, which is applied in the field of system identification of two-degree-of-freedom flexible leg systems, can solve problems such as modeling methods relying on accurate dynamic equations, achieve strong robustness and fault tolerance, and reduce errors , the effect of strong nonlinear mapping ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention relates to a system identification method for a two-degree-of-freedom flexible leg system, the steps of which are as follows:
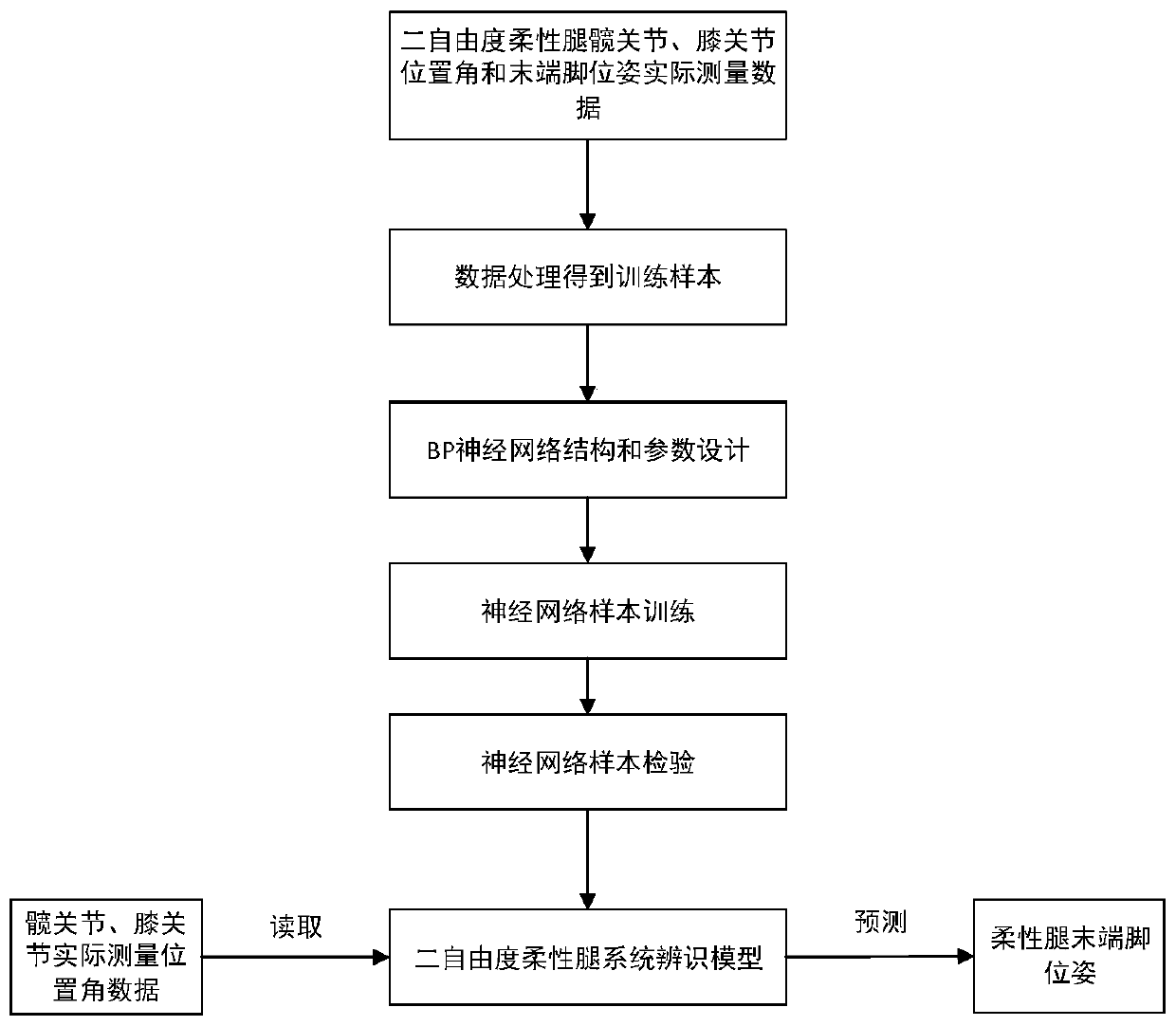
[0027] The principle of the invention is to use the BP neural network to establish a system identification model of the two-degree-of-freedom flexible leg, and then predict the position and posture of the end foot of the flexible leg. The specific steps are as figure 1 shown, as described below:
[0028] (1) Collect sample data, and calculate the position angle θ of the hip joint and knee joint of the two-degree-of-freedom flexible leg through actual measurement 1 , θ 2 and the pose of the end foot of the two-degree-of-freedom flexible leg, the position angle data of the two joints are passed through the following formula:
[0029]
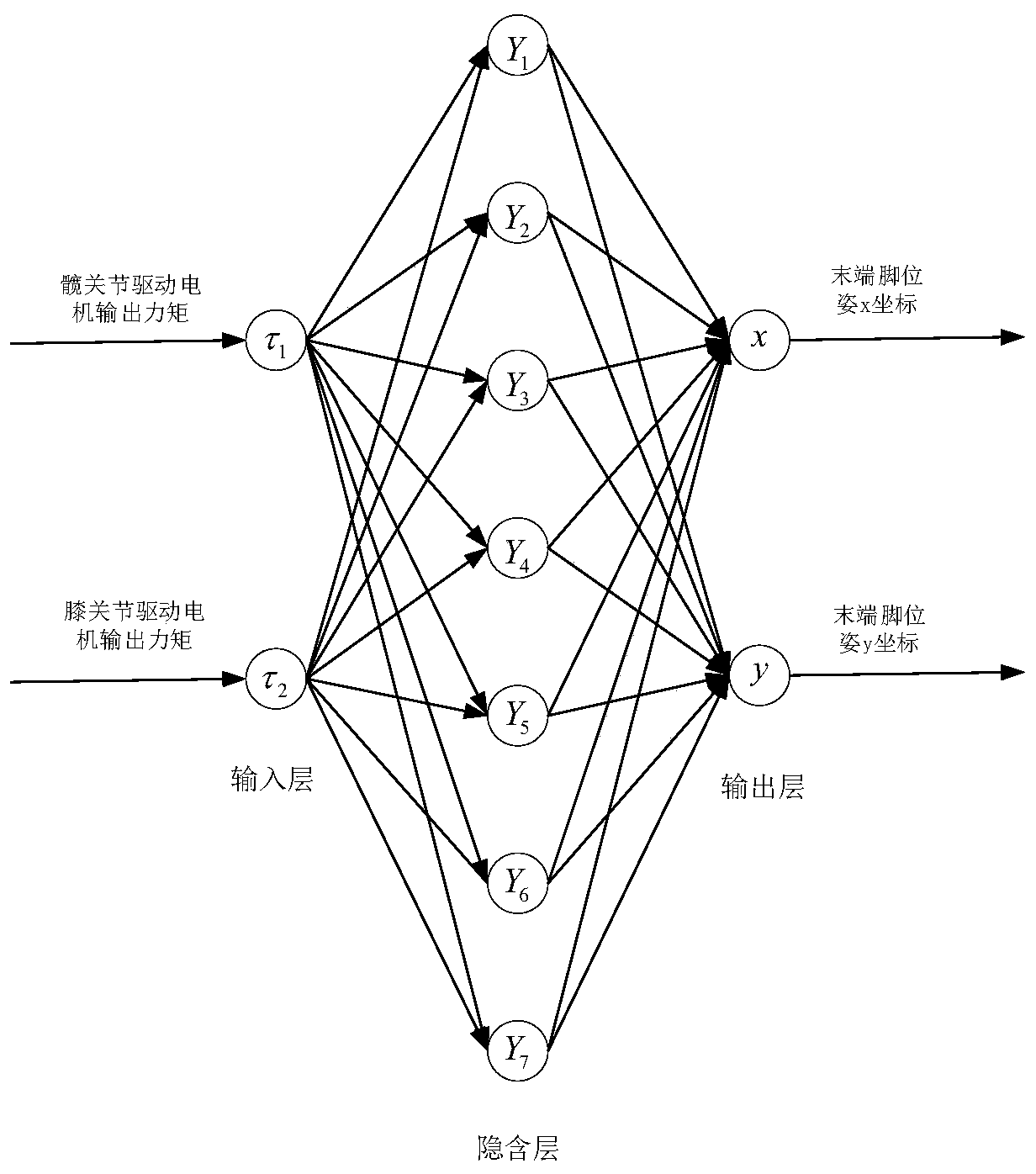
[0030] Calculate the output torque of the drive motors of the two joints, in the formula τ 1 , τ 2 is the torque on the hip joint and knee joint; θ 1 , θ 2 is the position angle of u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More