

Electromagnetic clutch type folding controllable multi-knuckle mechanical gripper and working method
A mechanical gripper and clutch-type technology, which is applied to the electromagnetic clutch-type foldable and controllable multi-knuckle robotic gripper and the working field, can solve the problems of inability to fold and recycle each knuckle, and achieve the effect of compact structure, small size and wide application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the accompanying drawings.
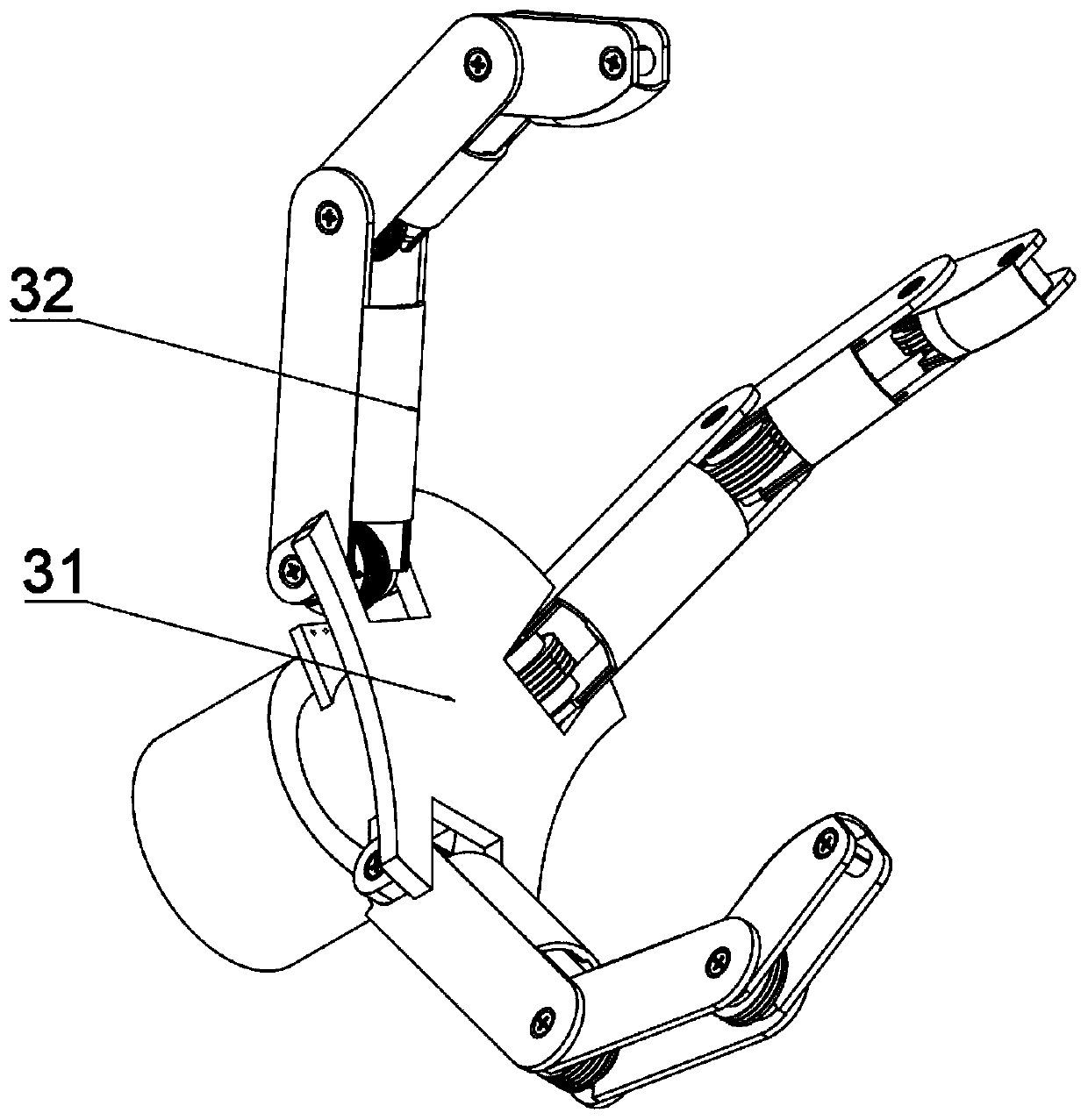
[0035] Such as figure 1 As shown, the mechanical gripper described in the patent of the present invention includes three fingers 32 and a palm 31 .
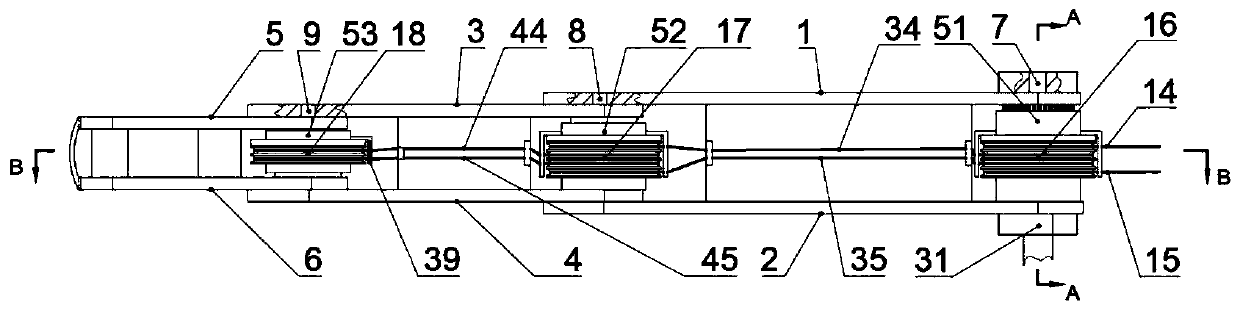
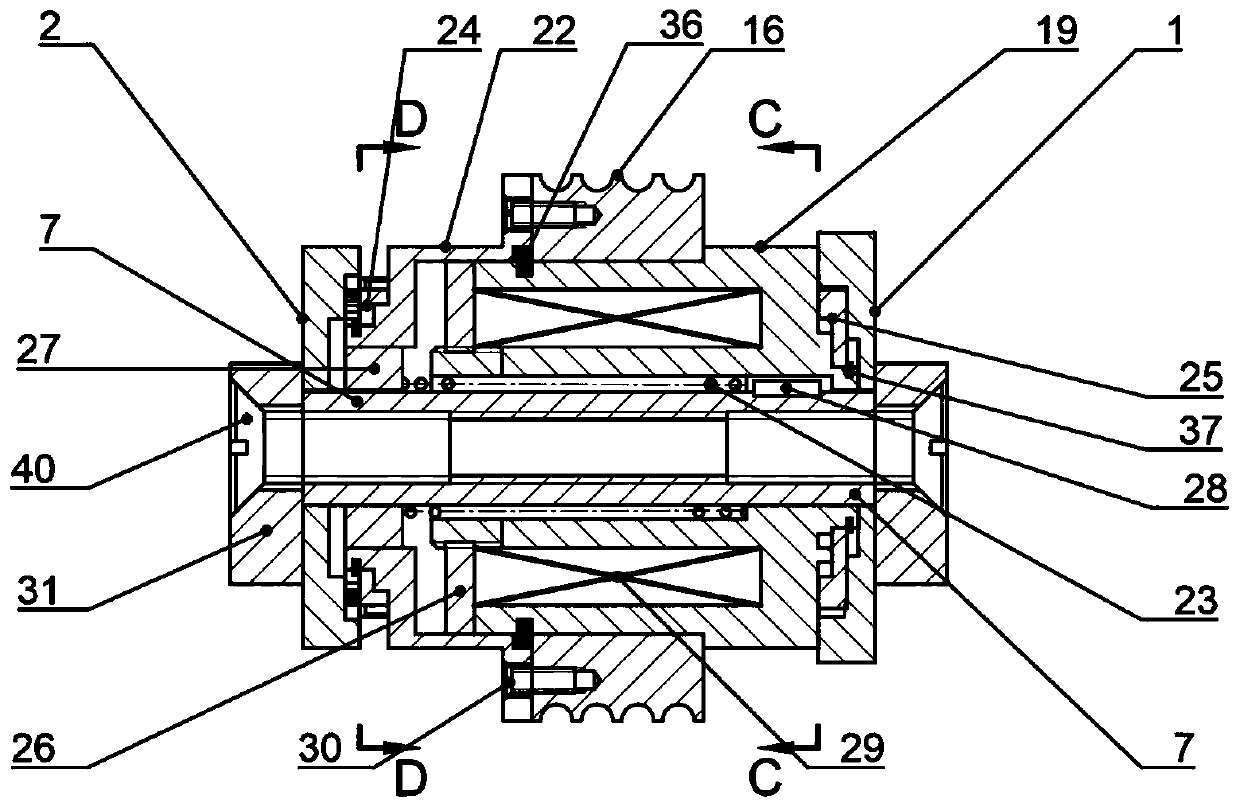
[0036] Such as Figure 2-3 As shown, the upper baffle plate 1 and the lower baffle plate 2 of the first knuckle are connected to the palm 31 through the first connecting shaft 7 , and the first connecting shaft 7 is fixed on the palm 31 through the countersunk head screw 40 . The first finger joint can rotate around the first connection axis 7 . The second knuckle upper baffle 3 and the second knuckle lower baffle 4 are connected to the first knuckle through the second connecting shaft 8 . The second connecting shaft 8 is fixed on the first knuckle by screws, and the second knuckle can rotate around the second connecting shaft 8 . The upper baffle plate 5 of the third knuckle and the lower baffle plate 6 of the third ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More