

Map alignment method and system based on collaborative VSLAM
A map and map fusion technology, applied in the field of computer vision, can solve the problem of less research on VSLAM and achieve the effect of improving the accuracy of map construction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] At present, the map alignment method based on VSLAM, such as PTAM, proposes and realizes the parallelization of tracking and mapping, and distinguishes the front and back ends for the first time (tracking needs to respond to image data in real time, and map optimization is carried out on the back end). Many subsequent visual SLAM system designs A similar approach was also taken. PTAM uses nonlinear optimization as the back-end scheme, rather than the filter back-end scheme. At the same time, a keyframes mechanism is proposed, that is, instead of finely processing each image, several key images are strung together to optimize its trajectory and map.
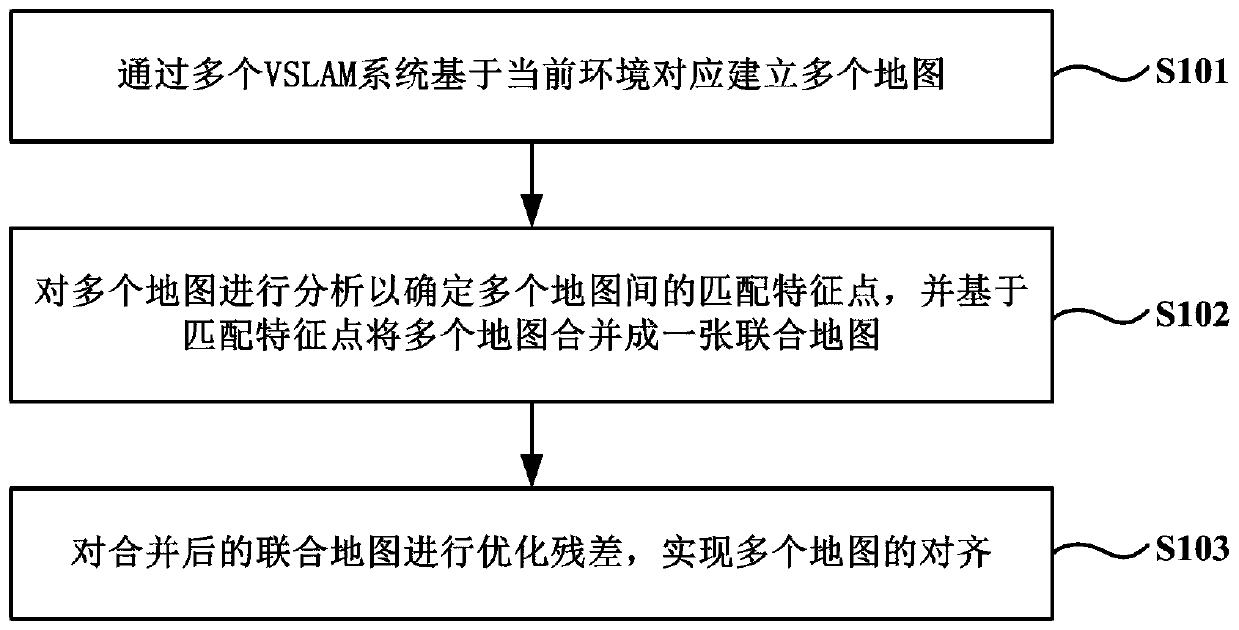
[0043] figure 1 is a schematic flowchart of a map alignment method based on cooperative VSLAM according to an embodiment of the present application. see figure 1 As we know, the collaborative VSLAM-based map alignment method provided by the embodiment of the present application may include:
[0044] Step S101: Create mu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More