

Multi-aircraft cooperative high-precision mapping and positioning system for unmanned aerial vehicles
A positioning system and unmanned aerial vehicle technology, applied in control/adjustment system, vehicle position/route/height control, three-dimensional position/channel control, etc., to achieve the effect of high mapping accuracy, short planning time and accurate positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
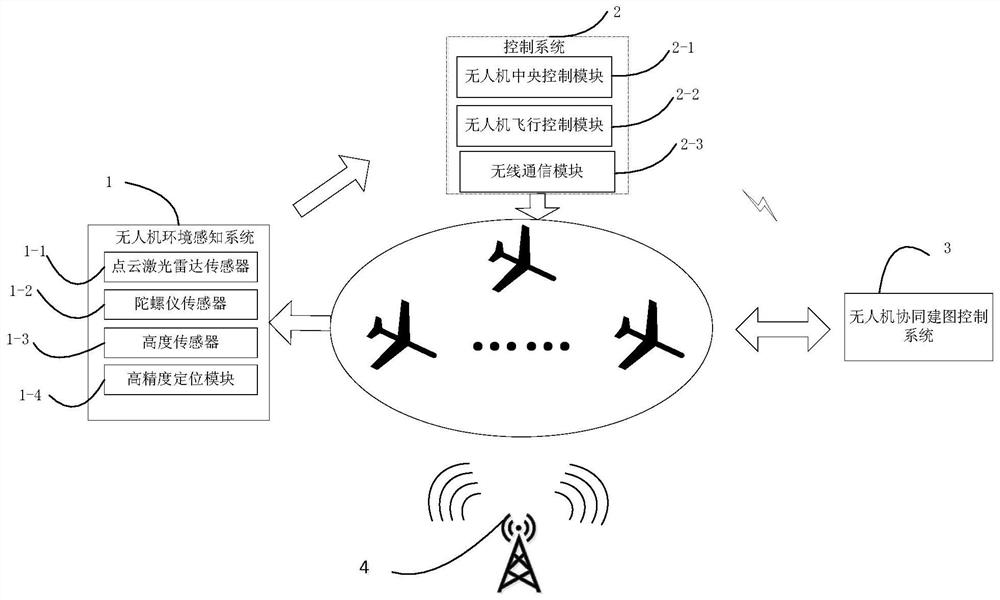
[0033] Specific implementation mode one: the following combination figure 1 and figure 2 This embodiment is described. A multi-machine cooperative high-precision mapping and positioning system for UAVs described in this embodiment includes a UAV environment perception system 1, a control system 2, a UAV cooperative mapping control system 3 and a communication system. System 4;
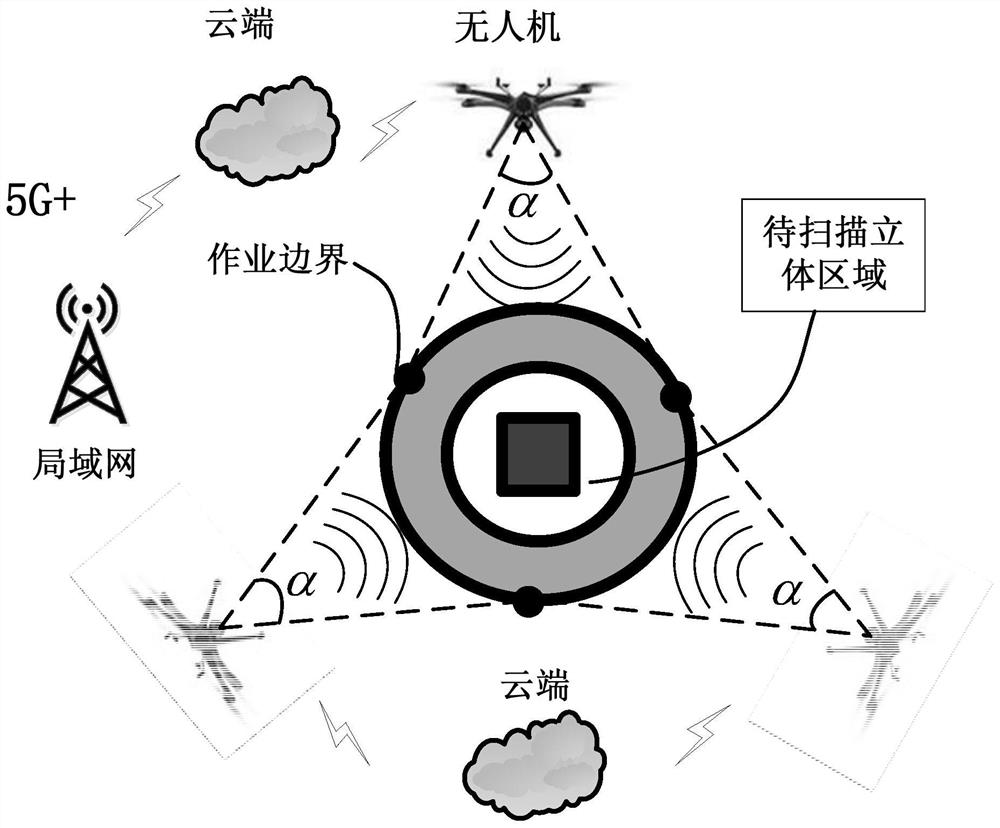
[0034] The communication system 4 includes a communication base station, and a wireless local area network is established through the wireless base station, and the wireless local area network covers the target area;
[0035] UAV environment perception system 1 adopts point cloud scanning to obtain point cloud data of the target area, UAV height data and UAV positioning data;
[0036] The control system 2 is used to control the flight speed, angle and pose of each drone according to the positions of multiple drones at different times;
[0037] UAV cooperative mapping control system 3 is used to pla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More