

Path Planning Method for Agent Based on Straight-line Deviation Method
A path planning and deviation degree technology, applied in the field of artificial intelligence research, can solve problems such as poor work efficiency and real-time performance, and high computational time complexity, and achieve short planning time, low computational time complexity, and reduced path length Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0039] The agent path planning method based on the straight line deviation method includes the following steps:
[0040] 1. Establish an environment model, that is, establish a proportionally reduced model according to the actual environment, and establish a corresponding coordinate system;
[0041] In order to realize and verify the straight line deviation strategy, the present invention makes the following assumptions when modeling the environment in the robot motion space:
[0042] (a) The mobile robot moves in a two-dimensional limited space;
[0043] (b) There are a finite number of known static obstacles distributed in the robot motion space. The obstacles can be described by polygons and the height information of the obstacles can be ignored, and only the (x, y) plane can be used to describe them;
[0044] (c) In order to ensure that the path is not too close to the obstacle, the boundary of the obstacle is expanded outward, and the expansion size is 1 / 2 of the maximum...
Embodiment
[0098] 1. Use the present invention to carry out simulation experiments
[0099] 1. Environment topology implementation
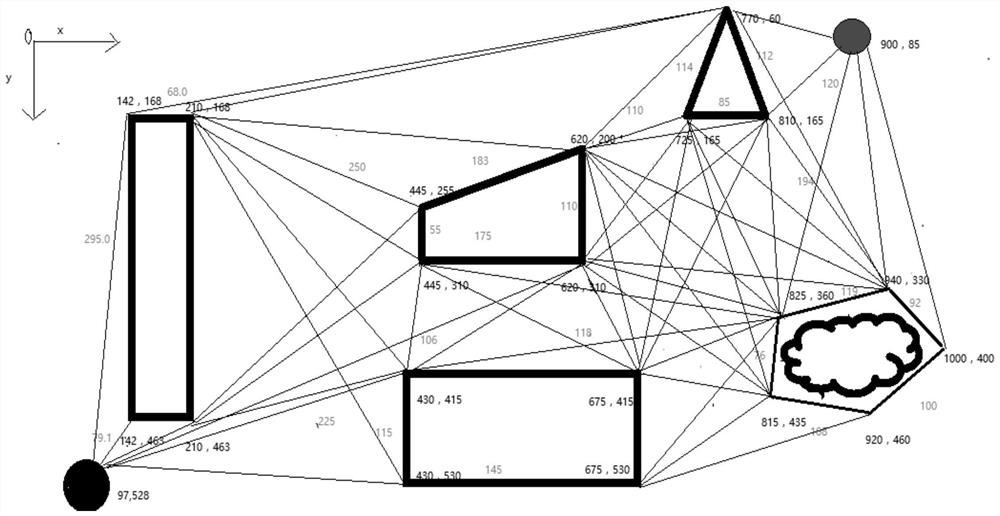
[0100] First of all, this experiment simulates the static global working environment of the intelligent mobile robot, and projects it in the rectangular coordinate system in equal proportion, and marks the coordinates of each node and the connection between the nodes, such as figure 1 shown.
[0101] The experiment hopes that such an optimal route can be achieved in a simpler working environment roadmap, so that it can be easily generalized to a more complex working environment.
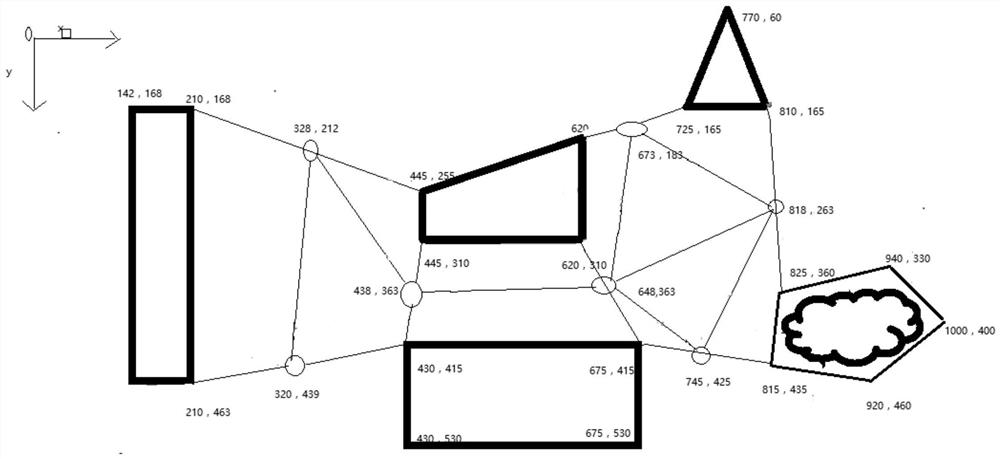
[0102] 2. Node addition implementation based on route adjustment
[0103] Depend on figure 1 It can be clearly seen that the number of routes that the mobile robot can reach is large and complex. If this is the experimental basis, the amount of calculation and the complexity of the process will increase. Therefore, according to the rules added to the nodes, some nodes and route...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More