

Multi-unmanned aerial vehicle dynamic route planning method based on space and time collaboration
A time-coordinated, multi-UAV technology, applied in non-electric variable control, three-dimensional position/course control, vehicle position/route/altitude control, etc., can solve the problem that the UAV route planning algorithm cannot be directly applied to multi-machine scenarios, Problems such as multi-aircraft coordination factors and route planning algorithms cannot be used are not considered
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
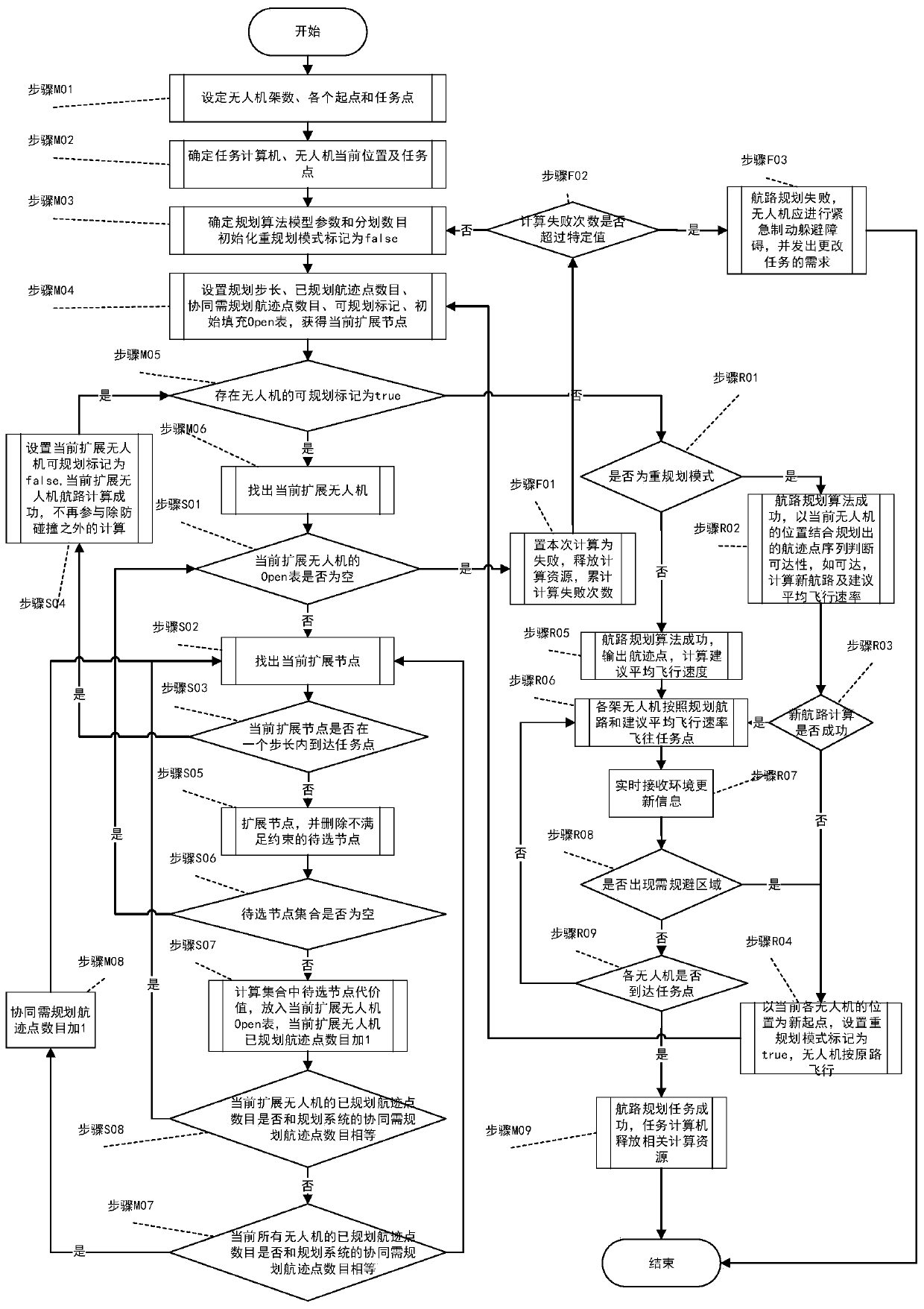
[0053] The technical solution of the present invention includes the following content: wherein, step M** indicates that such steps are related to the overall control of the multi-machine route planning algorithm, and step S** indicates that such steps are mainly related to the route expansion process of a certain unmanned aerial vehicle , step F** indicates that such steps are related to the processing of admissible planning failures, and step R indicates that such steps are mainly related to the processing of suddenly appearing areas to be avoided:
[0054] Step M01, set a total of N UAVs to participate in the multi-UAV dynamic route planning that requires space constraints and time coordination. The N UAVs can communicate with each other or the same base in real time. The starting point of the N UAVs is are P start,i , the task points are P end,i , P start,i ,P end,i All are three-dimensional coordinates, where i=1, 2, ..., N, continue to step M02;
[0055] Step M02, thr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More