

Distributed cluster unmanned aerial vehicle formation changing method
A distributed cluster and unmanned aerial vehicle technology, applied in the direction of non-electric variable control, instrument, three-dimensional position/channel control, etc., can solve the problems of not being able to obtain the allocation plan, increasing the flight range, and poor algorithm flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
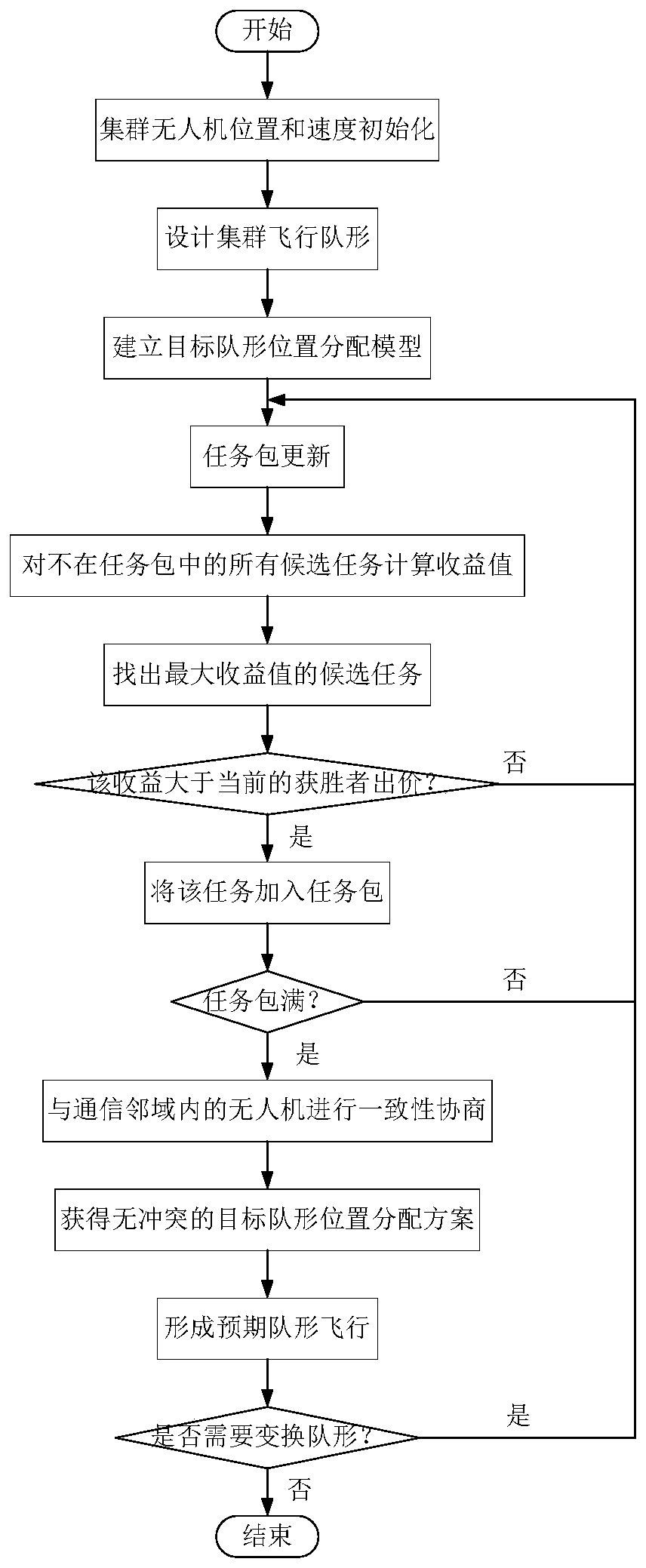
Method used
Image

Examples
Embodiment
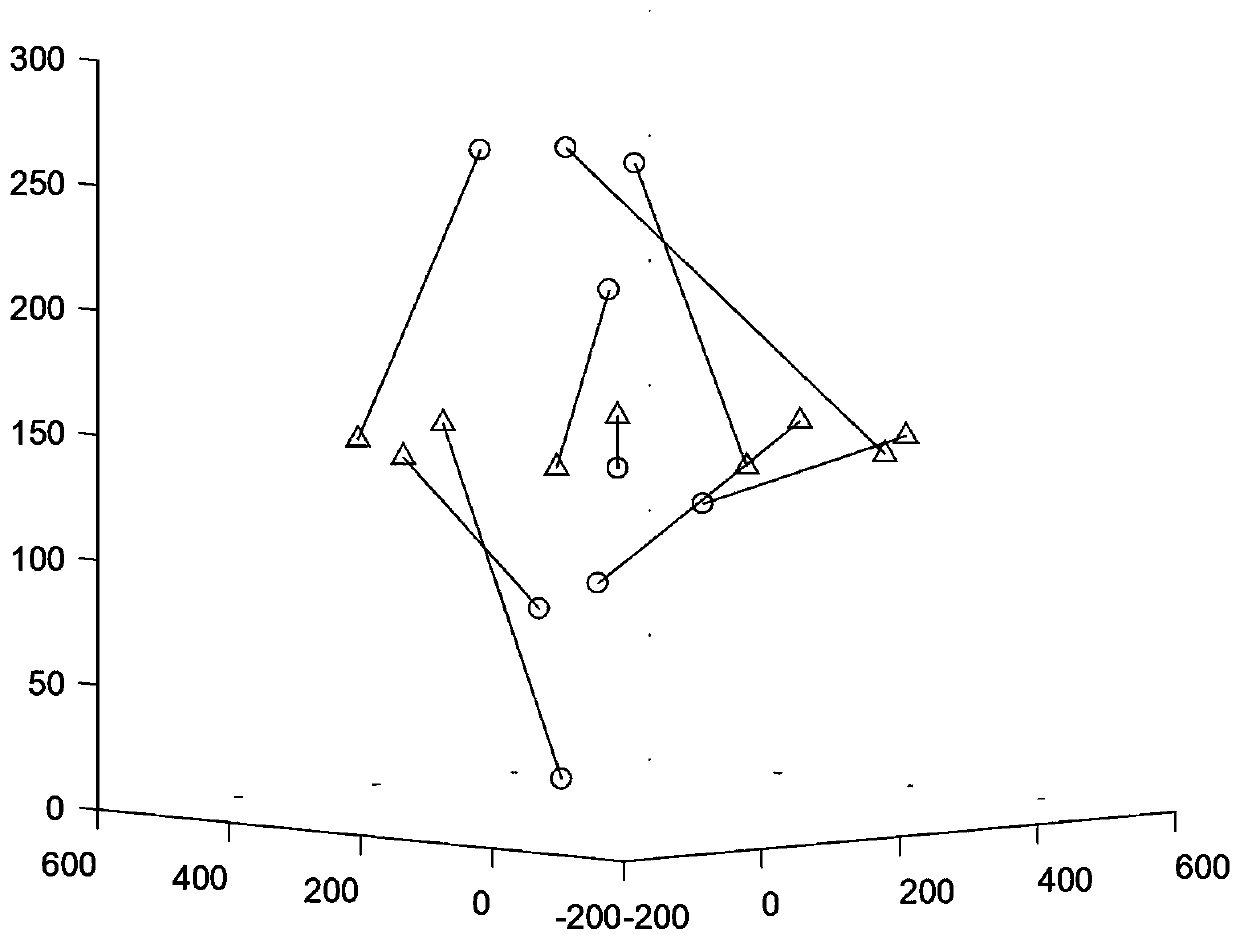
[0110] The system simulation environment is: Intel 2.8GHz, PC with 16GB memory, Windows10 operating system, Matlab2016b platform.
[0111] In this embodiment, a three-dimensional map model is adopted, and the coordinate system is a plane coordinate system. Suppose there are nine drones in total, the initial speed of each drone is randomly generated in [0,0.1]×[0,0.1]×[0,0.1]m / s, and the initial position is in [0,300]×[0,300 ]×[0,300]m randomly generated. The initial position q of the virtual leader γ (0)=(150,150,150)m, initial speed p γ (0)=(20,20,10)m / s, acceleration u γ =0m / s 2 . The communication radius of each drone is r=300m, and the expected distance between drones is d=200m. The expected formation of UAVs is a circle, the maximum speed of UAVs is limited to 60m / s, and the maximum acceleration is limited to 10m / s 2 , λ=0.0003, the initial revenue R=100 for each target position.
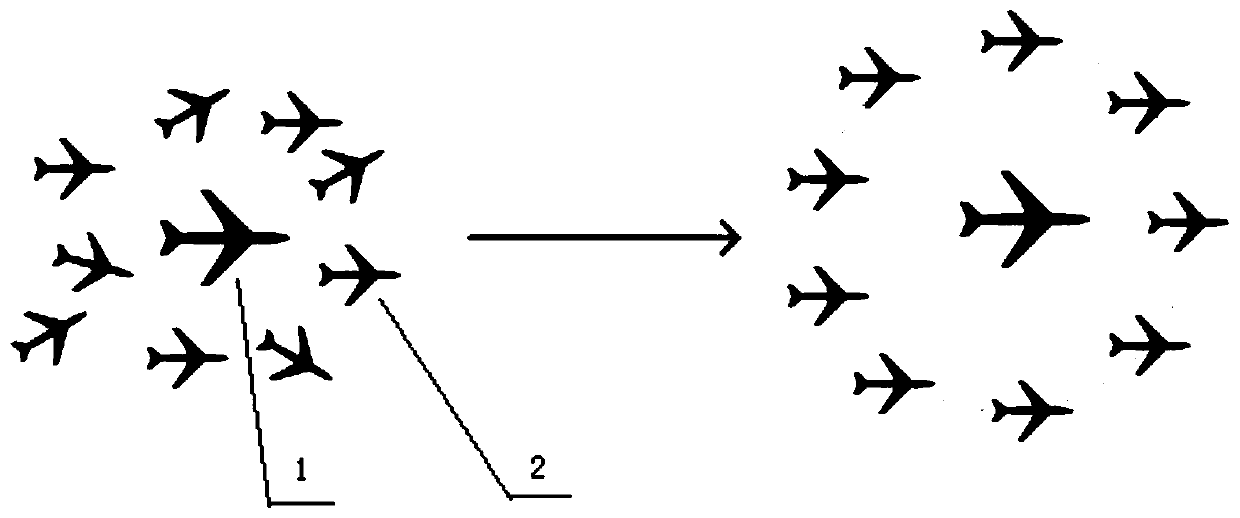
[0112] In step 2, take the desired formation as a circle as an example, such as f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More