Robot path planning algorithm with improved DQN under fast search mechanism
A path planning and robotics technology, applied in manipulators, manufacturing tools, neural learning methods, etc., can solve problems such as low search efficiency and low environmental utilization, and achieve the effect of improving search efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
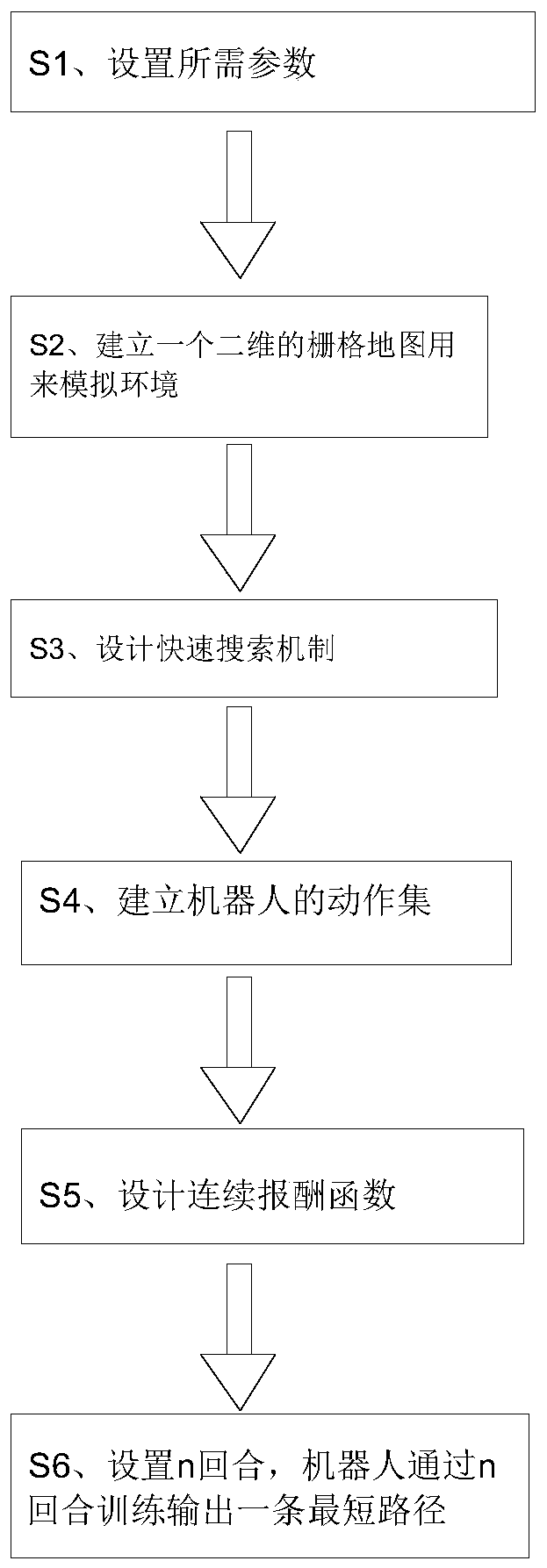
[0070] combine figure 1 , an improved DQN robot path planning algorithm under the fast search mechanism, including the following steps:
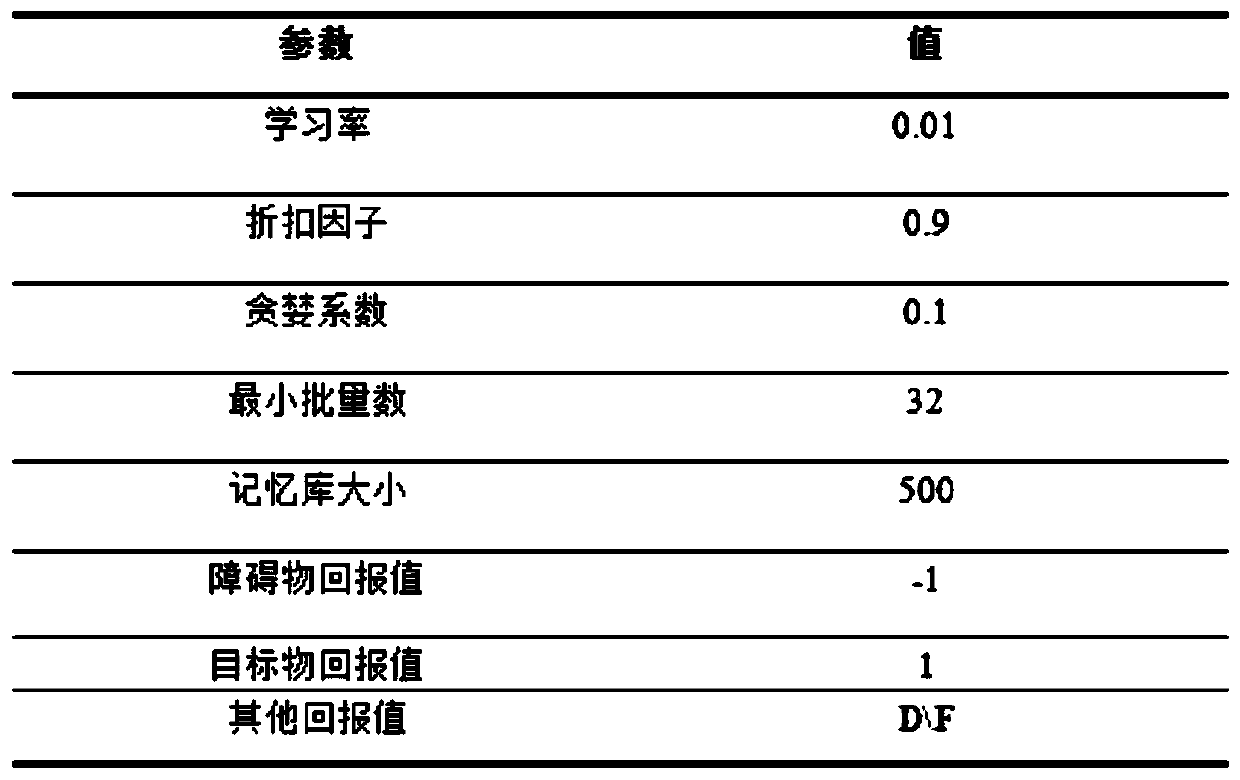
[0071] S1. Set the parameters required for the experiment. The parameters include greedy coefficient ∈, memory size M, discount rate γ, learning rate α, and batch learning value batch;
[0072] S2. According to the slope characteristics of the three-dimensional terrain environment and the geometric characteristics of the robot's movement, a two-dimensional grid map is established to simulate the environment. In the map, gray rectangles are used to represent robots, circles are used to represent target points, and black rectangles are used to represent obstacles , the starting coordinates of the robot are defined by S(x s ,y s ), target point coordinates G (x g ,y g ), the current coordinate is C(x c ,y c );
[0073] S3. Design a fast search mechanism, use a fast search mechanism to partially model the current location environment, cal...
Embodiment 2
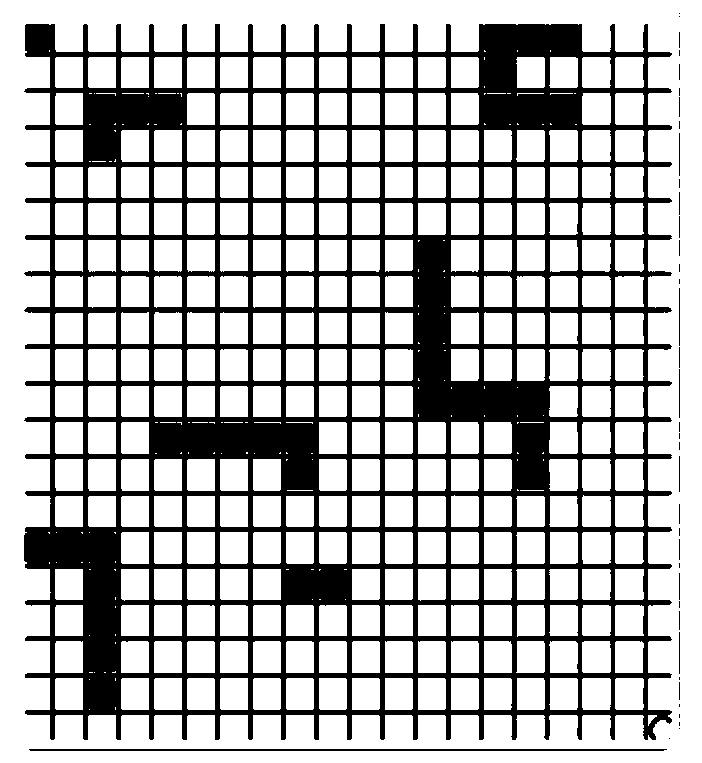
[0078] combine image 3 , the simulation environment is written in python tkinter, a grid map with a size of 20*20, the gray rectangle in the map represents the robot, the circle represents the target point, and the black rectangle represents obstacles. The starting coordinates of the robot are represented by S(x s ,y s ), target point coordinates G(x g ,y g ), the current coordinate is C(x c ,y c ).
Embodiment 3
[0080] according to image 3 , Figure 5 , Figure 6 , Figure 7 and Figure 9 As shown, a 20*20 grid map is established to simulate the current environment. The gray rectangle in the map represents the robot, the circle represents the target point, and the black rectangle represents obstacles. The starting coordinates of the robot are represented by S(x s ,y s ), target point coordinates G(x g ,y g ), the current coordinate is C(x c ,y c ).
[0081] The design of the fast search mechanism, the design of the fast search mechanism, this design uses a fast search mechanism to partially model the current location environment, and calculate the reward value while modeling, and calculate the action and obstacle point with the largest reward value deep memory. The formation of deep memory makes the robot more precise in action selection and target search, reduces unnecessary searches, and improves search efficiency.
[0082] The design of the action set, the present inven...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More