Non-stop control method and system for mobile robot
A mobile robot and control method technology, applied in the field of non-stop control methods and systems, can solve the problems of inability to obtain dynamic parameters, complex modeling, and lack of versatility, and achieve the effect of universal applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] In order to further explain the features of the present invention, please refer to the following detailed description and drawings of the present invention. The attached drawings are for reference and explanation purposes only, and are not used to limit the protection scope of the present invention.
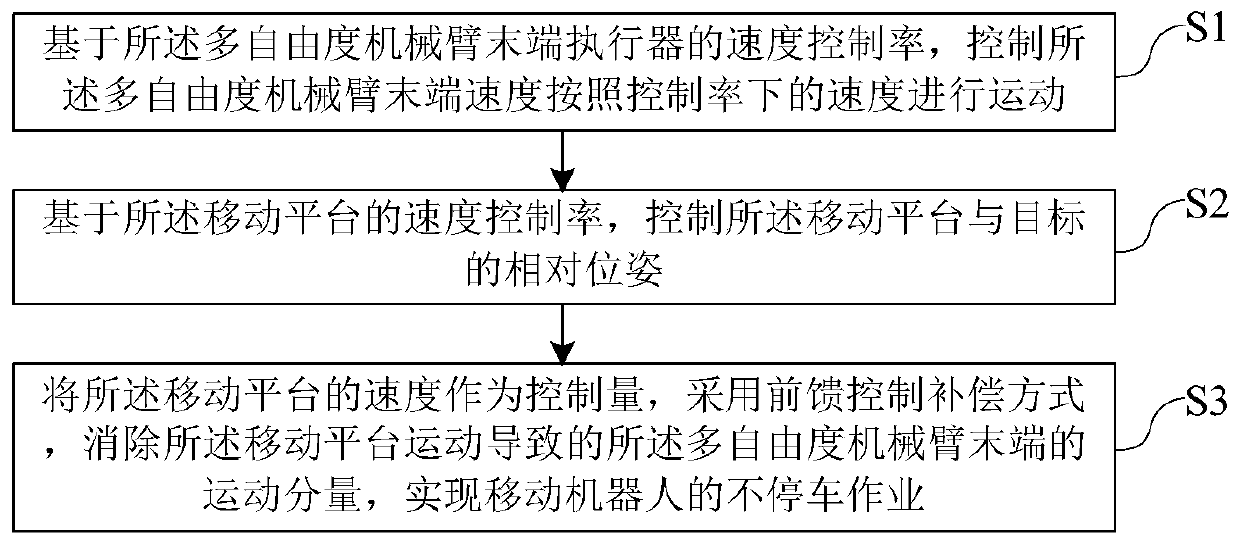
[0058] Such as figure 1 As shown, this embodiment discloses a non-stop control method for a mobile robot. The mobile robot includes a mobile platform and a multi-degree-of-freedom manipulator, including the following steps S1 to S3:
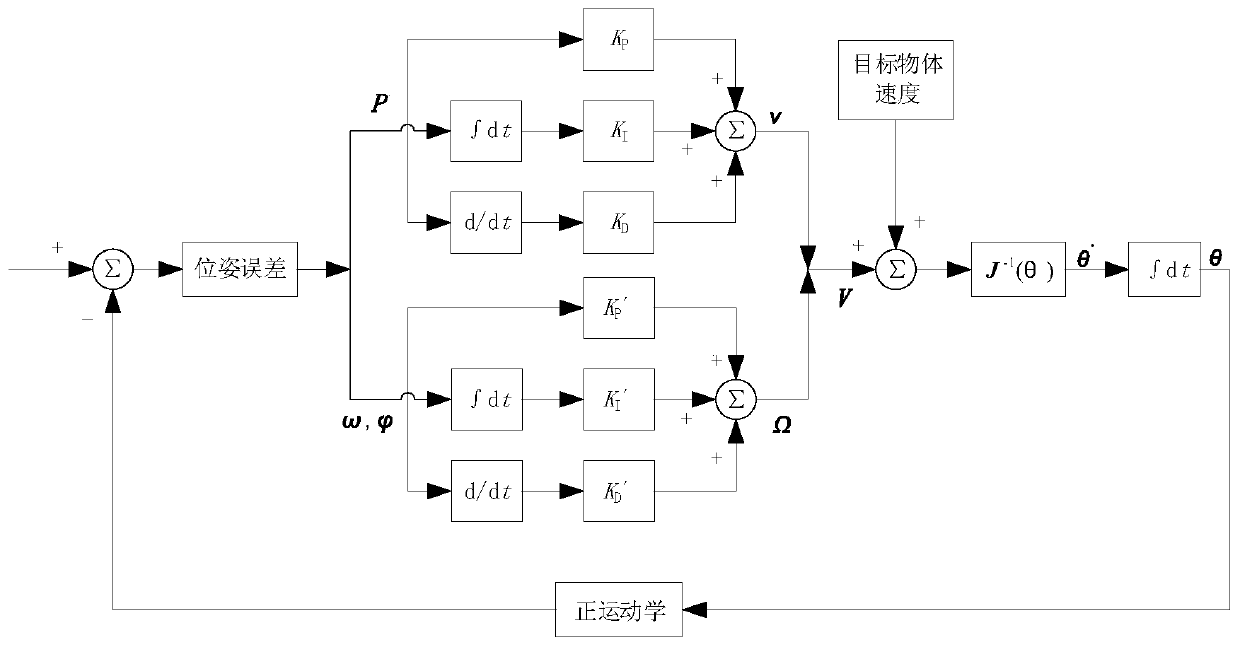
[0059] S1, based on the speed control rate of the end effector of the multi-degree-of-freedom manipulator, controlling the end speed of the multi-degree-of-freedom manipulator to move at the speed under the control rate;
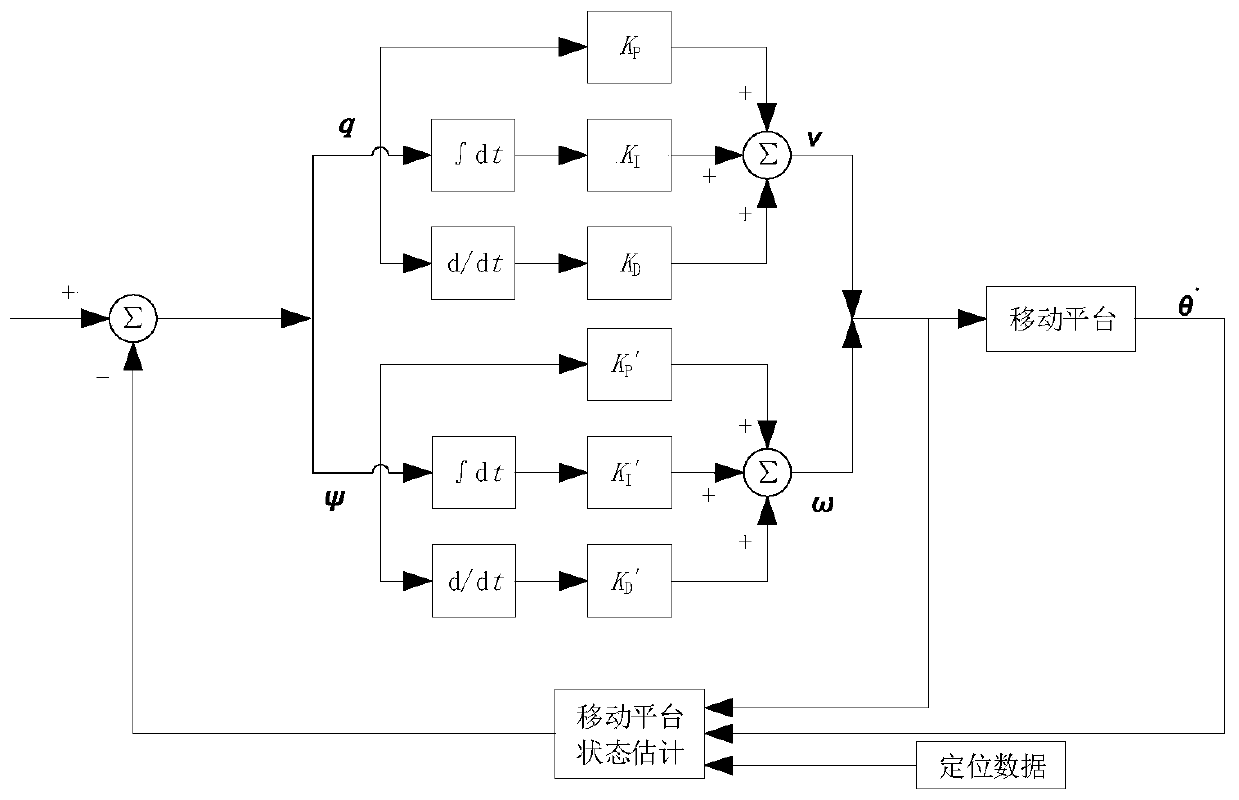
[0060] S2, based on the speed control rate of the mobile platform, control the relative pose of the mobile platform and the target;
[0061] S3. Taking the speed of the mobile platform as a control variable, adopting a feedforward ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More