

Dredging robot for underwater dredging operation
A robot and operation technology, which is applied to mechanically driven excavators/dredgers, earth movers/shovels, construction, etc., can solve the problem of incomplete cleaning of underwater silt and achieve the effect of increasing the working range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
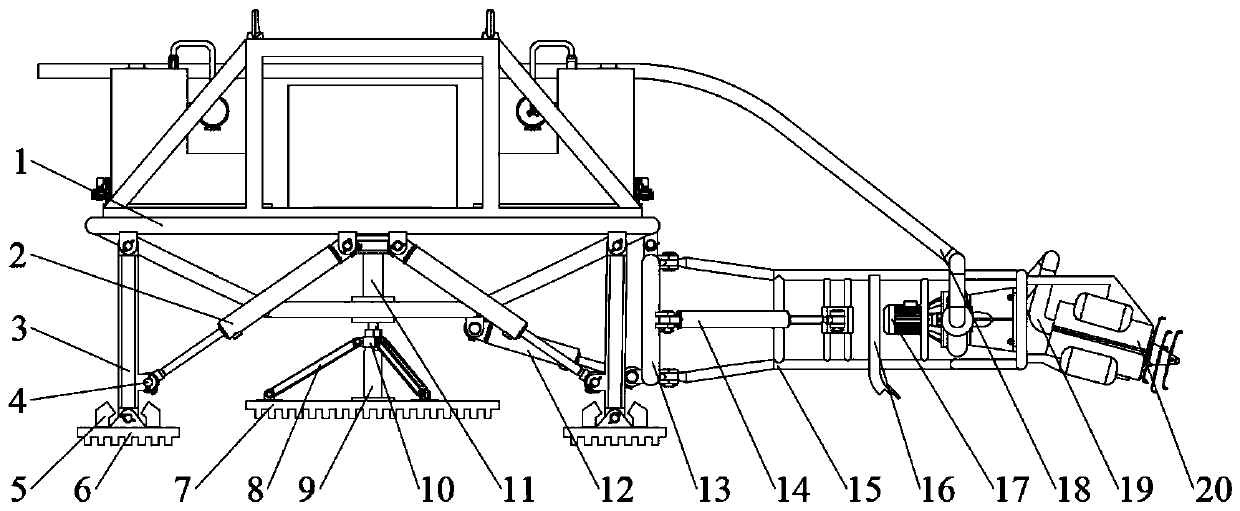
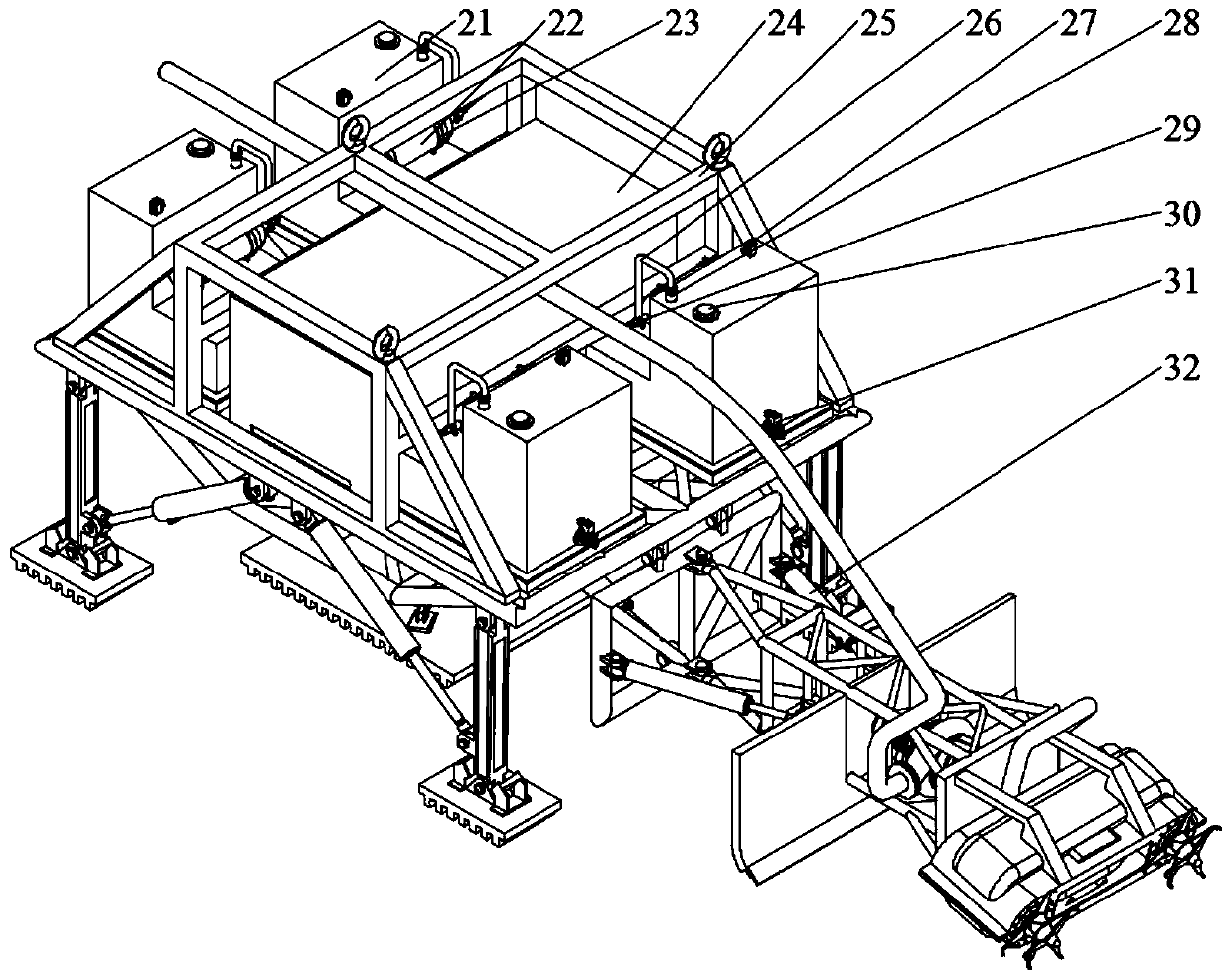
[0018] The working range of the robot of the present invention is 0-10m underwater. The specifications of the robot are (length x width x height): 6000×2500×2400mm, the weight is 1500kg, and its main material is 316L stainless steel to reduce the corrosion of water on the robot. It is a kind of dredging operation suitable for lakes, urban and rural rivers, and fish ponds with a water depth of 0-10m.
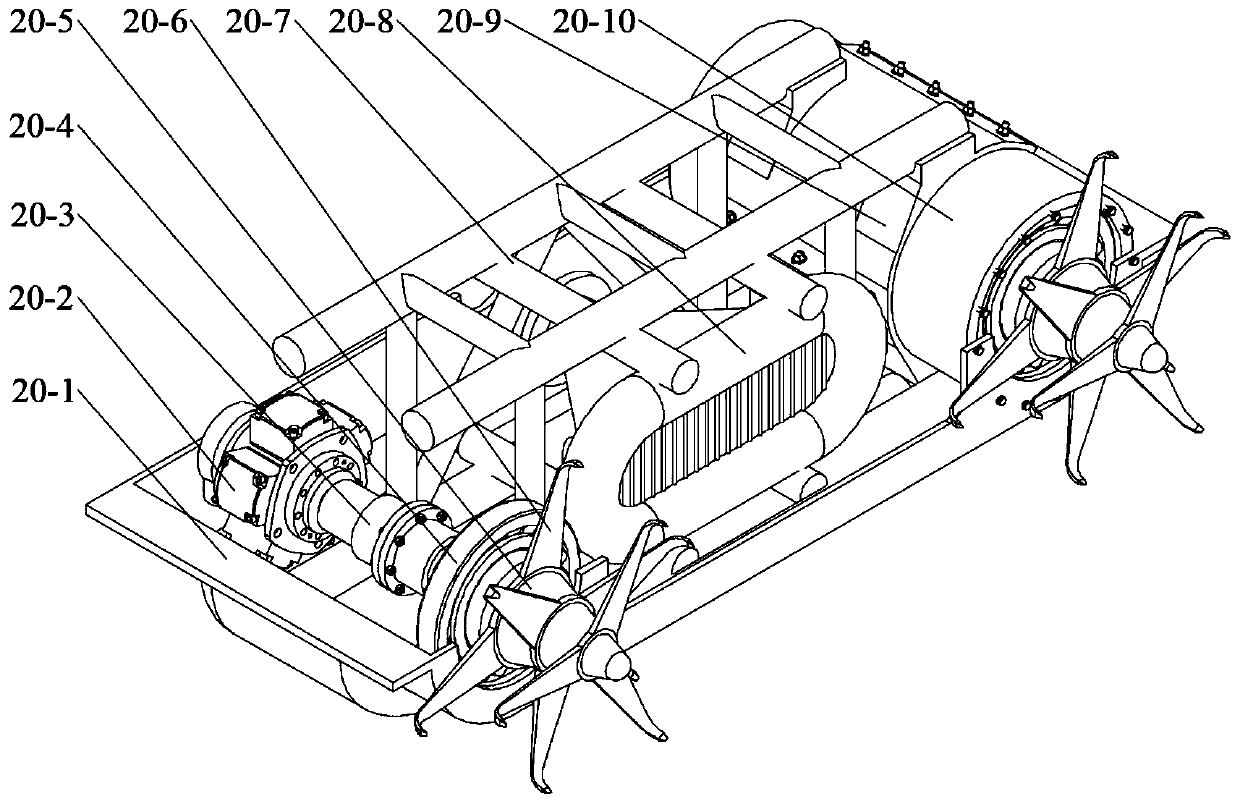
[0019] combine Figure 1 to Figure 4 , a dredging robot for underwater dredging operation of the present invention consists of a main body frame 1, a leg hydraulic cylinder 2, a leg 3, a pin shaft 4, a limit block 5, a foot 6, an abdomen support plate 7, a support leg 8. Support column 9, connector 10, abdominal hydraulic cylinder 11, heave hydraulic cylinder 12, swivel frame 13, swing hydraulic cylinder 14, forearm truss 15, mud scrap...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More