

Structured light plane calibration method and system in railway foreign matter detection scene
A technology of foreign matter detection and light plane, which is applied in the field of detection and inspection, can solve the problem of low efficiency of railway foreign matter intrusion detection, achieve the effect of reducing cumulative errors and expanding the detection area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
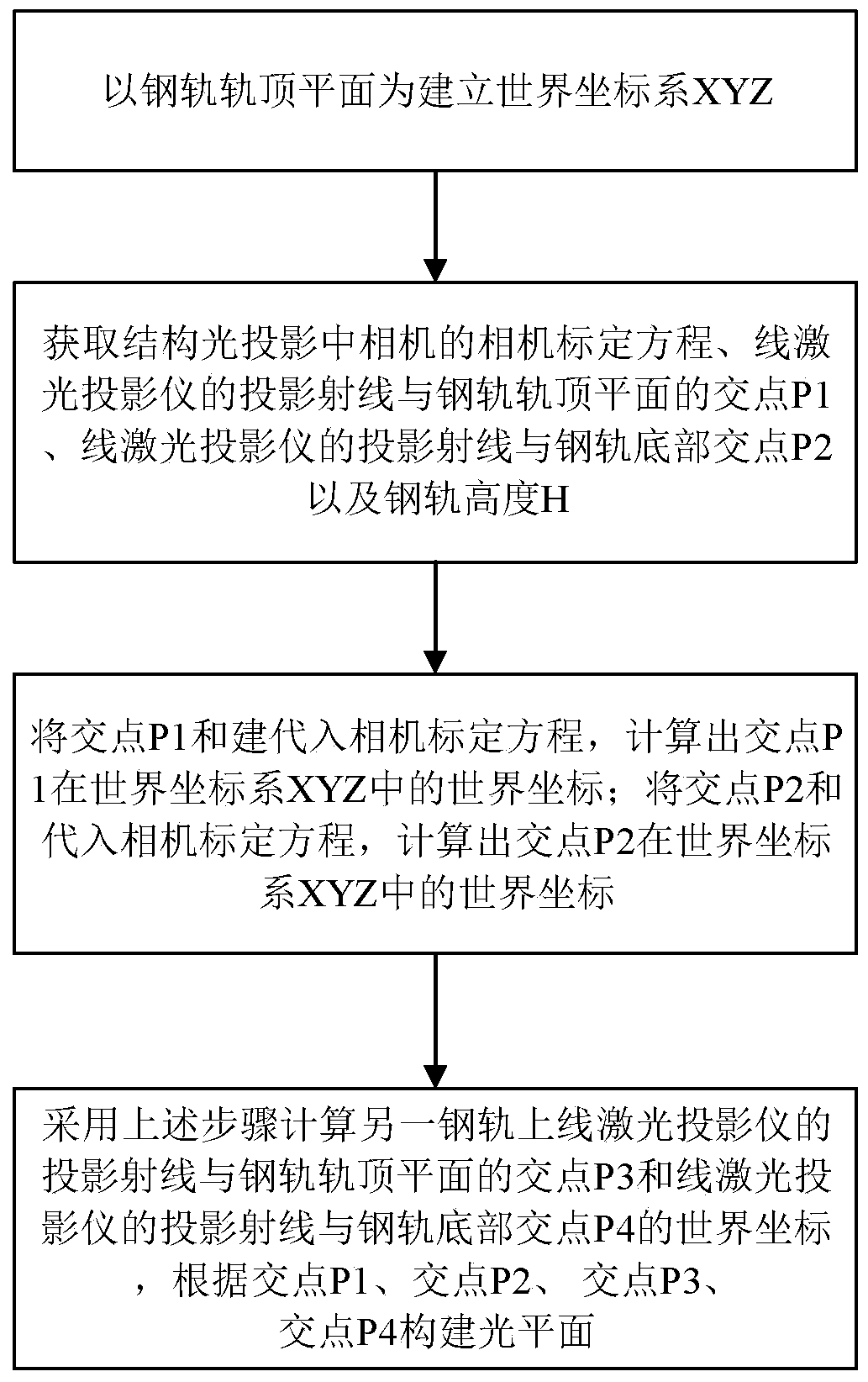
[0032] This embodiment provides a structured light plane calibration method in the railway foreign object detection scene, see figure 1 and image 3 , including the following steps:
[0033] S1: Establish the world coordinate system XYZ with the top plane of the rail as Z=0.
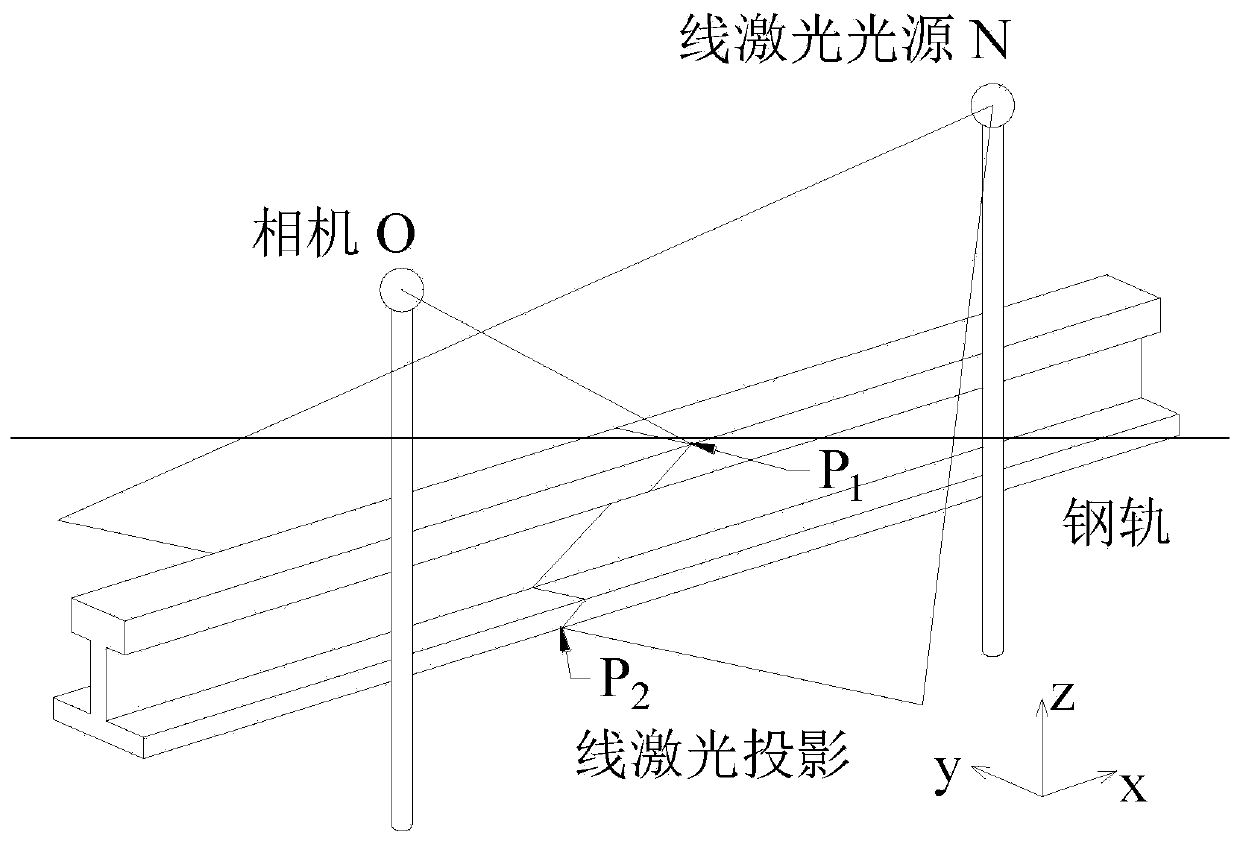
[0034] S2: Obtain the camera calibration equation of the camera in the structured light projection, the intersection point P1 of the projection ray of the line laser projector and the rail top plane Z=0, the intersection P2 of the projection ray of the line laser projector and the bottom of the rail, and the height H of the rail.
[0035] Structured light is a set of system structures composed of projectors and cameras. The specific light information is projected onto the surface of the object and the background by the projector, and then collected by the camera. According to the change of the light signal caused by the object, the information such as the position and depth of the object is calculated...
Embodiment 2
[0052] Write a program to achieve optical plane calibration. According to the procedure in Embodiment 1, the light plane calibration program should include four functional modules: camera calibration, target point extraction, target point world coordinate calculation, and light plane equation calculation.
[0053] Camera calibration determines the coordinate system transformation relationship. Use the Camera Calibrator in the Matlab toolbox to calibrate the camera. Target point extraction is realized by image difference and template matching. Firstly, images are taken under the condition of on and off of the line laser projector, and the line laser projection is obtained by difference of the gray value of the image. Then use the method of template matching to determine the Z coordinate of the target point. Calculate the world coordinates of the target point according to the Z coordinate, pixel coordinate and camera calibration equation of the target point. Calculate the op...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More