

Mobile robot positioning method
A mobile robot, positioning method technology, applied in the direction of re-radiation of instruments, electromagnetic waves, utilization of re-radiation, etc., can solve the problems of low accuracy, noise interference, inability to have timeliness, etc., to improve positioning accuracy and accelerate matching speed. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] In order to further illustrate the features of the present invention, please refer to the following detailed description and accompanying drawings of the present invention. The accompanying drawings are for reference and description only, and are not intended to limit the protection scope of the present invention.
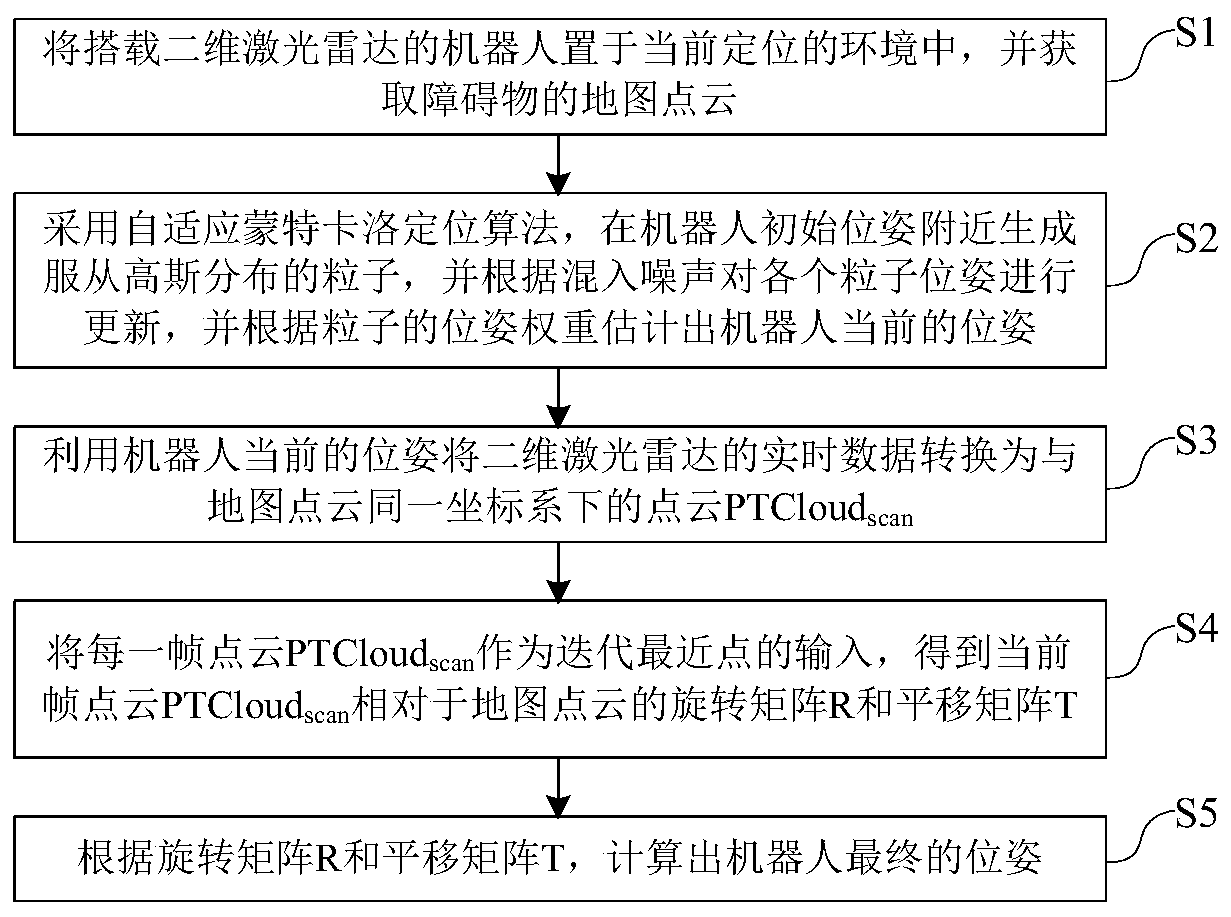
[0055] Such as figure 1 As shown, this embodiment discloses a mobile robot positioning method, including the following steps S1 to S5:
[0056] S1. Place the robot equipped with two-dimensional laser radar in the current positioning environment, and obtain the map point cloud of obstacles;
[0057] S2. Use the adaptive Monte Carlo positioning algorithm to generate particles that obey the Gaussian distribution near the initial pose of the robot, and update the pose of each particle according to the mixed noise, and estimate the current pose of the robot according to the pose weight of the particles. ;
[0058] S3. Use the current pose of the robot to conve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More