

Full-automatic submarine pipeline inspection robot for ocean engineering
A technology for inspection robots and submarine pipelines, applied in the direction of pipe components, special pipes, mechanical equipment, etc., can solve the problems of easy overturning, long distance, unstable walking, etc., to improve the traveling speed, increase the contact area, and reduce friction. The effect of resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
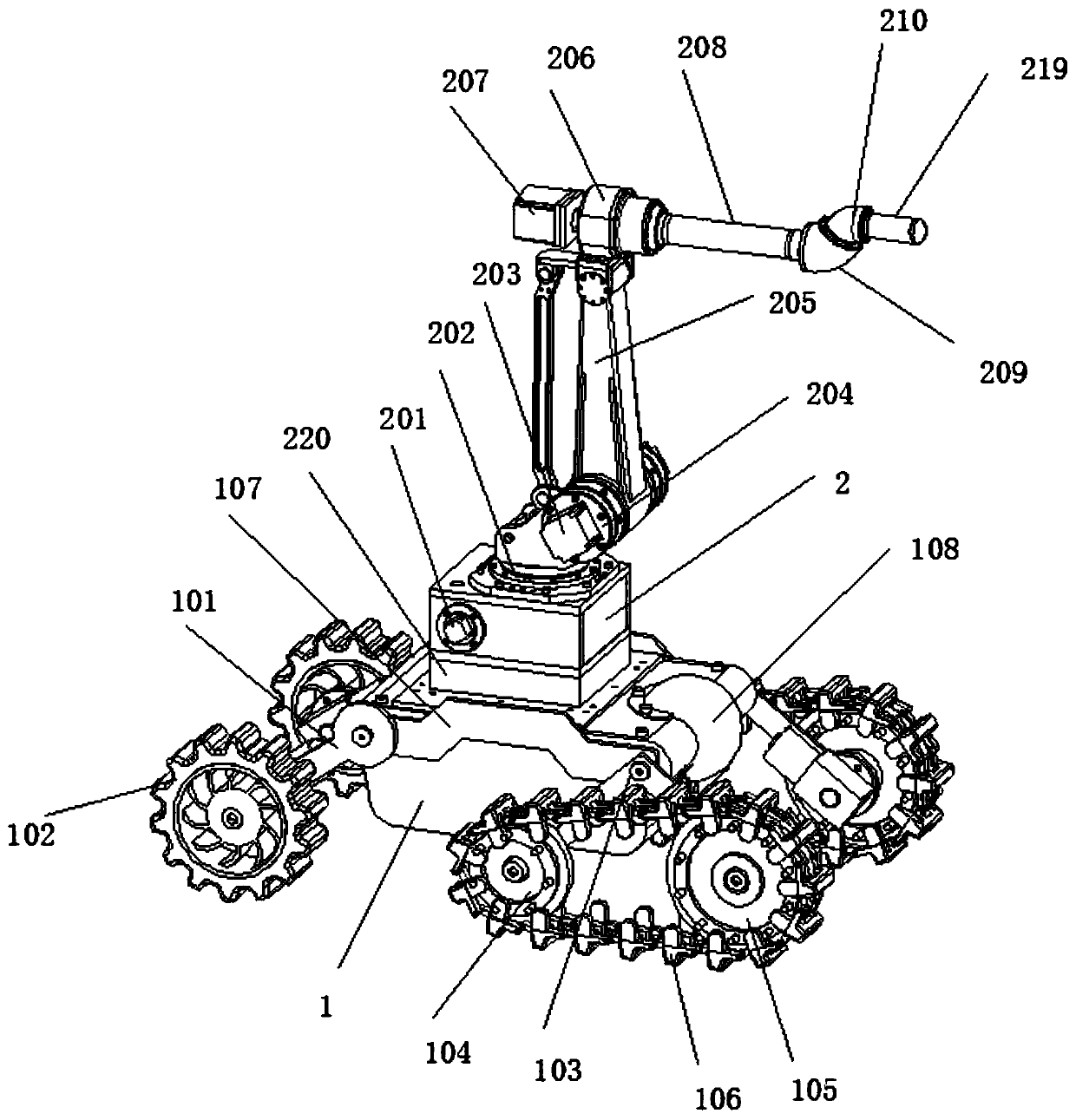
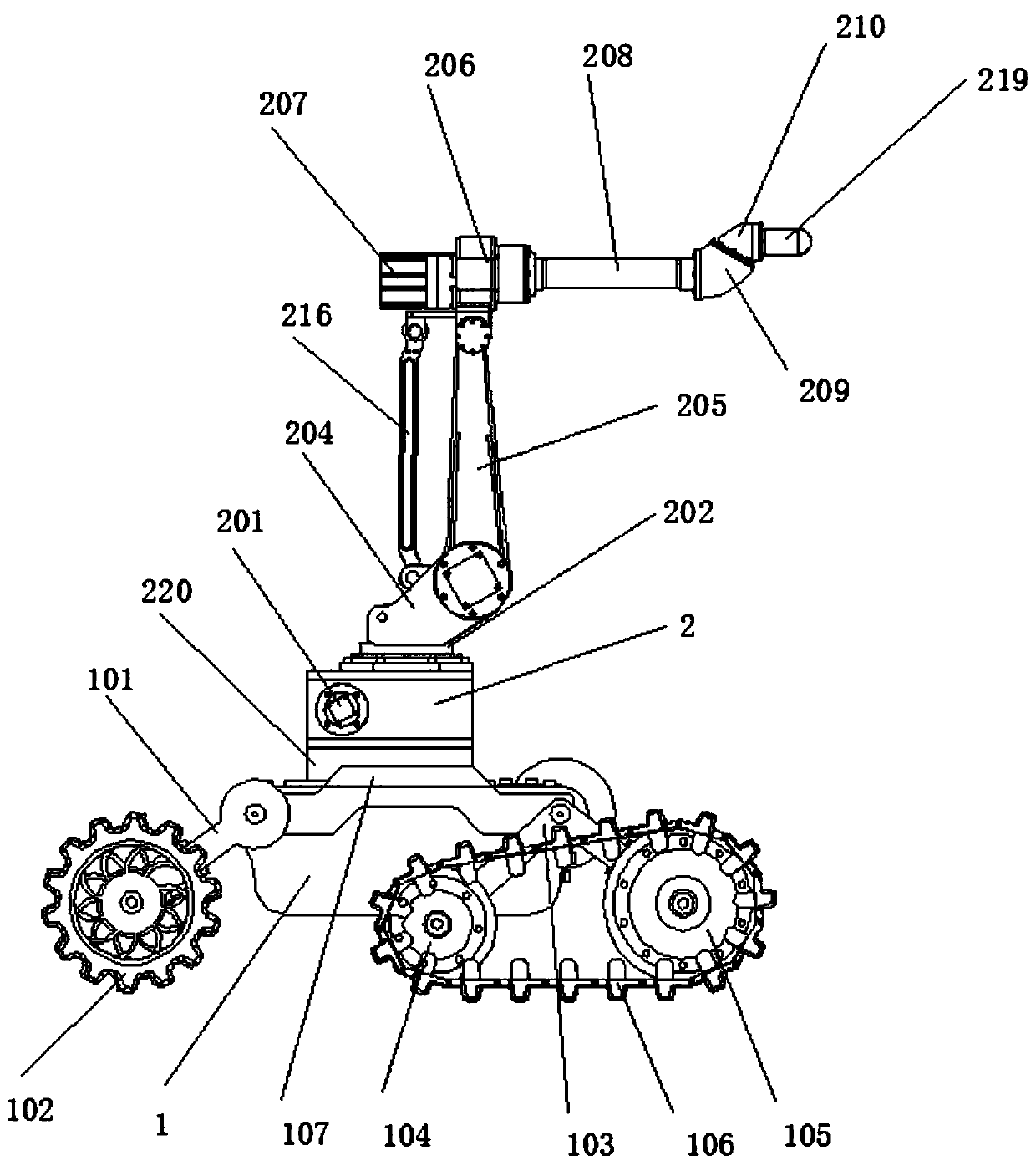
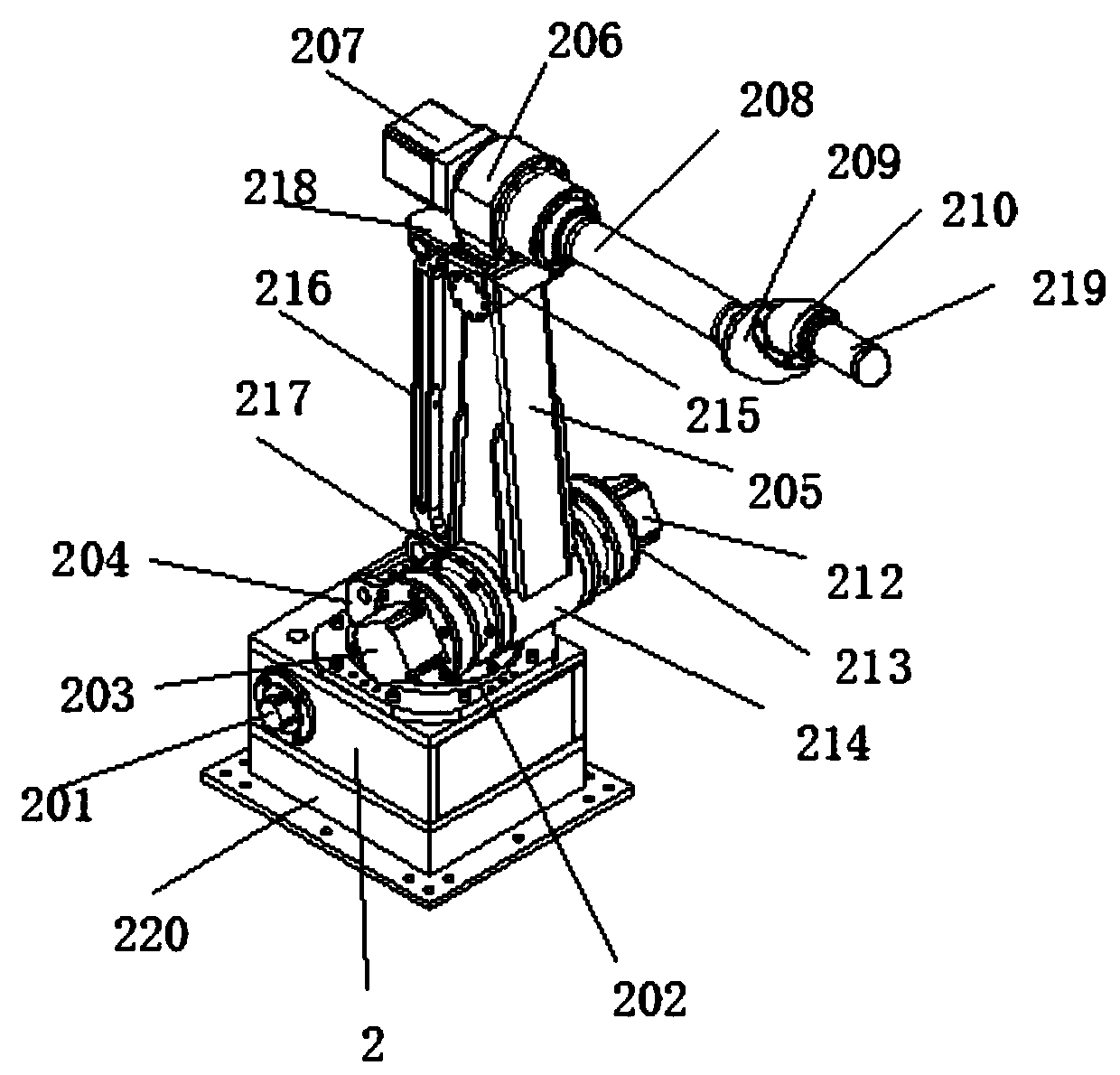
[0037] see Figure 1-8 , in an embodiment of the present invention, a fully automatic subsea pipeline inspection robot for marine engineering includes a traveling vehicle body 1 and a photographing frame 2, a camera 108 is arranged on the traveling vehicle body 1, and a camera 108 is mounted on the photographing body frame 2. A camera body 219 is provided, and the camera body frame 2 is fixedly arranged on the surface of the traveling vehicle body 1 through th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More