

Method for realizing public security real-time prediction and anti-smuggling deploying and controlling processing based on deploying and controlling vehicle driving path
A real-time prediction, vehicle driving technology, applied in the traffic control system, traffic flow detection, traffic control system of road vehicles, etc., can solve the problem of limited places for deployment and interception applications, difficulty in on-site deployment and interception, and only the current position of the deployment and control vehicles. and other issues to achieve the effect of saving police resources, improving efficiency, and improving success rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] In order to describe the technical content of the present invention more clearly, further description will be given below in conjunction with specific embodiments.
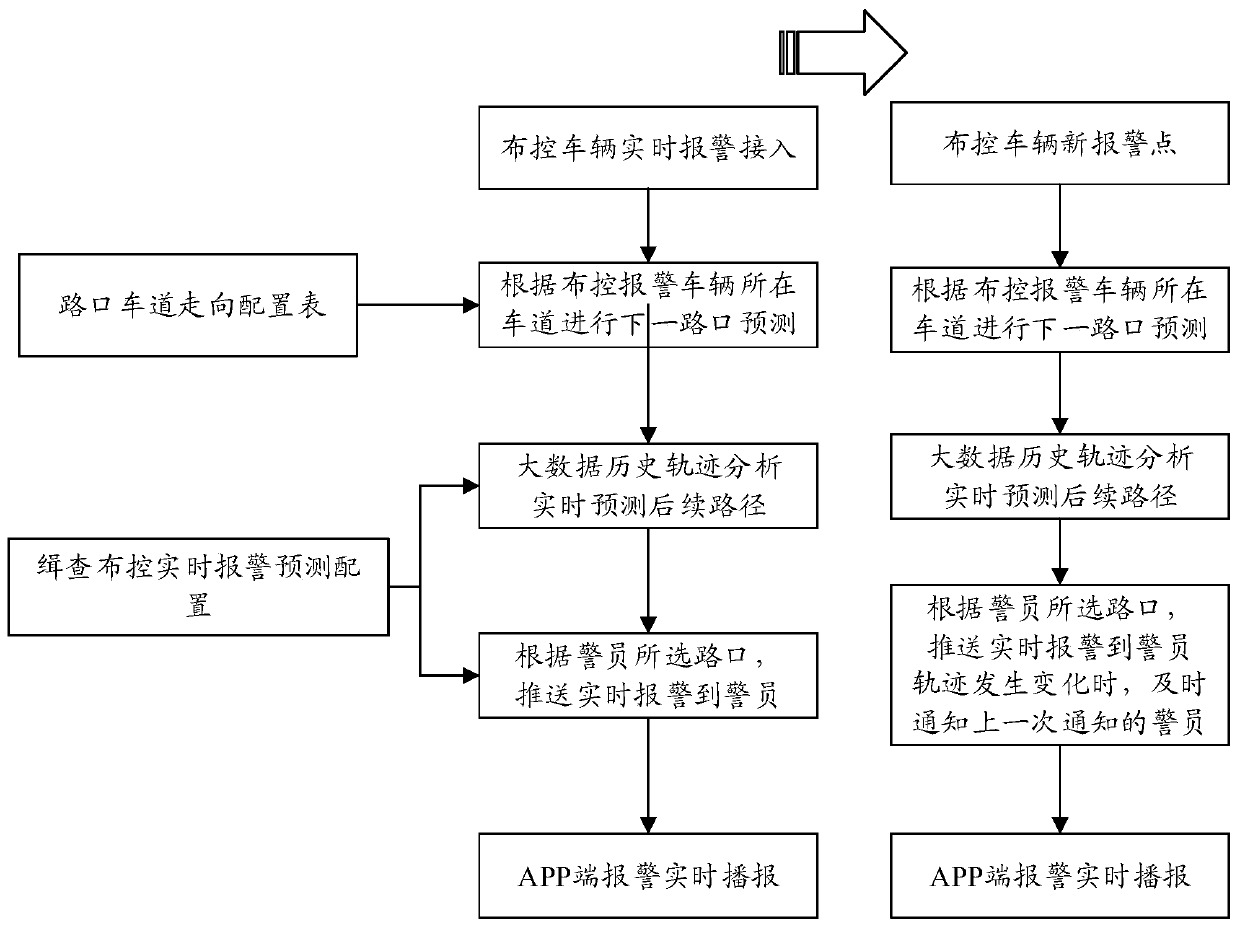
[0049] The method for realizing real-time public security prediction and investigation and control processing based on the travel path of the dispatched and controlled vehicles of the present invention comprises the following steps:
[0050] (1) Configure the topological relationship of the road network according to the lane direction of the intersection;
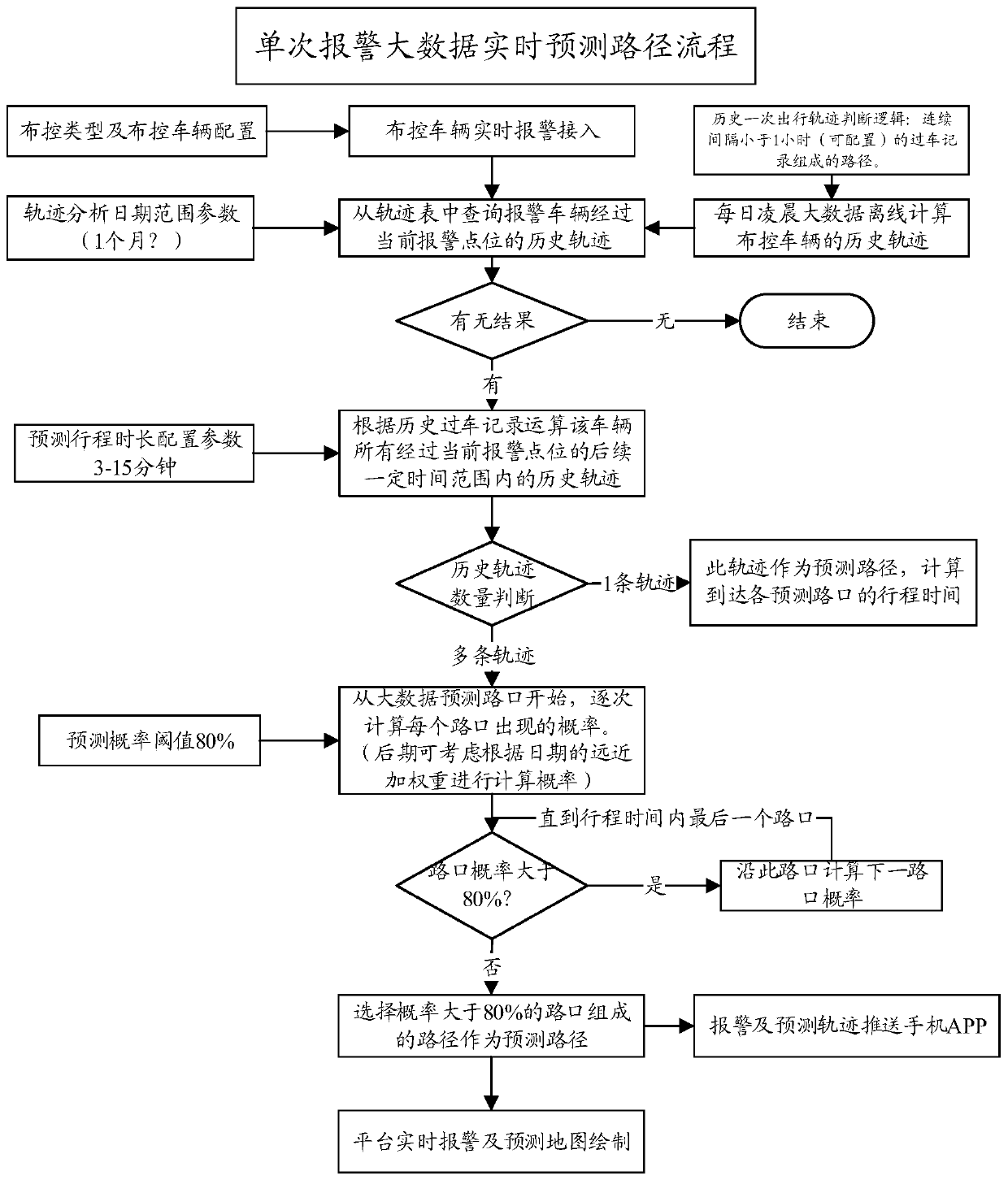
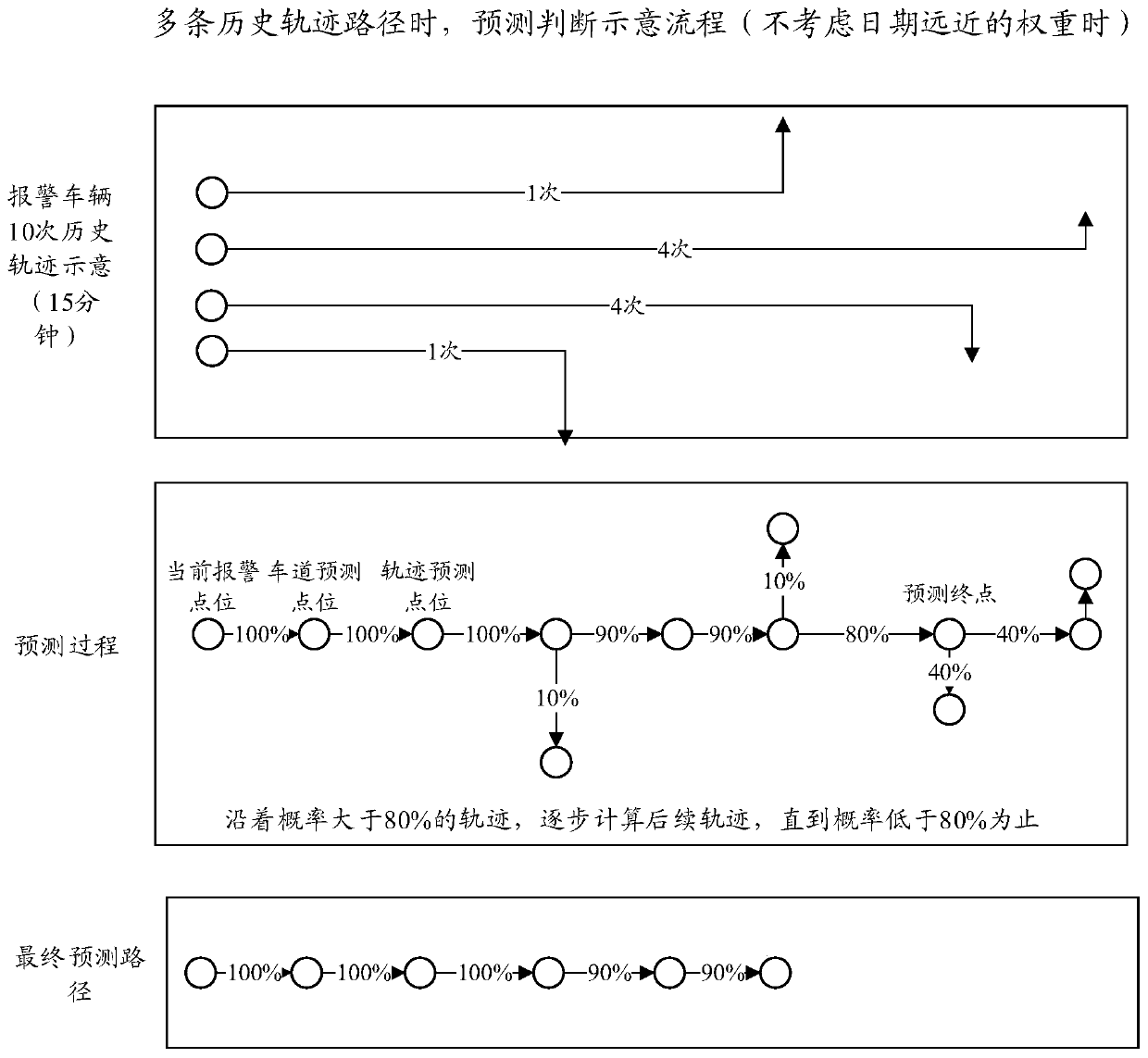
[0051] (2) Calculate the subsequent driving path and probability of the vehicle at each intersection according to the historical driving trajectory of the controlled vehicle;
[0052] (3) According to the intersection and lane where the vehicle is currently located, the topological relationship of the road network and the historical high probability path of the vehicle are retrieved;
[0053] (4) Predict the follow-up driving path of the dispatched vehi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More