

Rope-driven series mechanical arm
A manipulator and rope drive technology, applied in the field of manipulators, can solve the problems of too large base, too many driving sources, limiting the development of rope drive manipulators, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
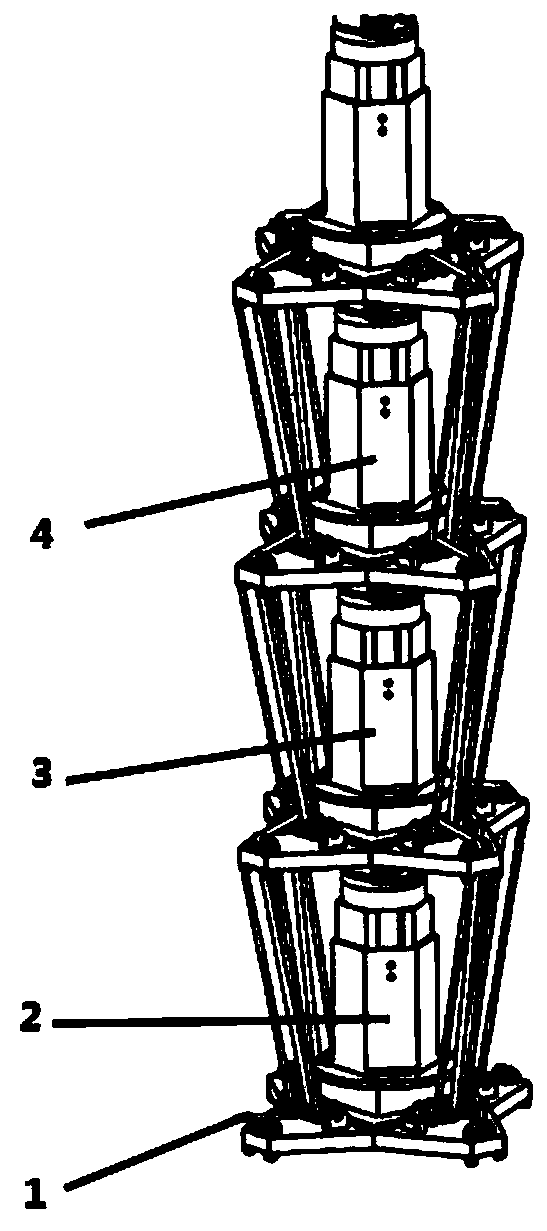
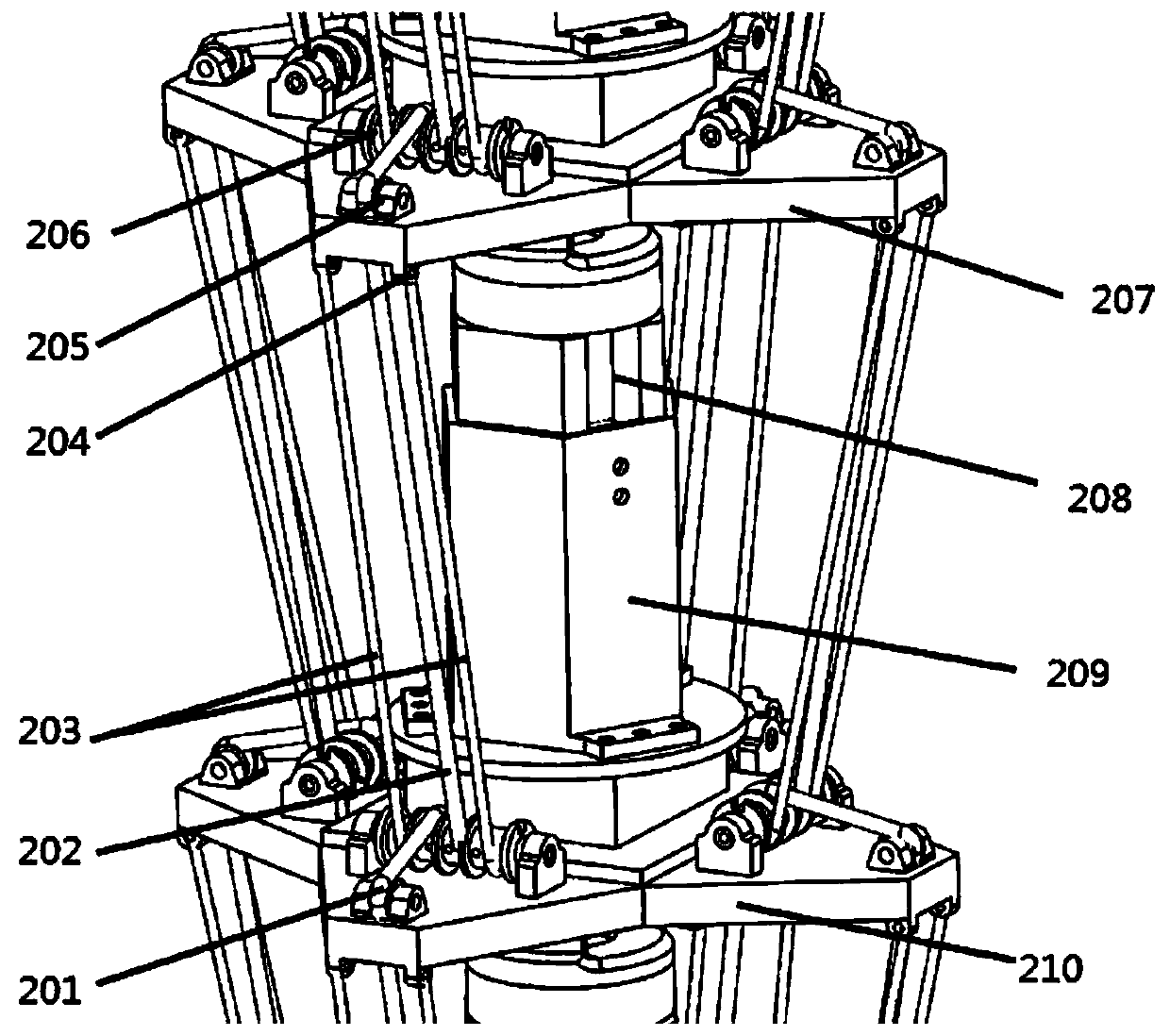
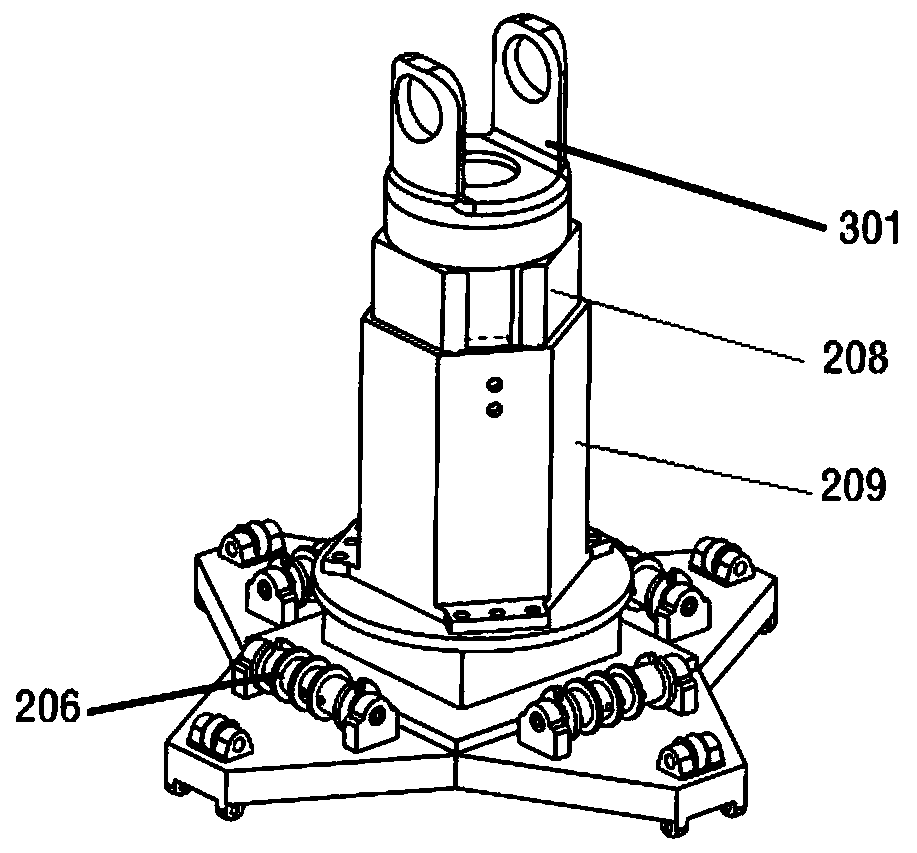
[0025] Such as Figure 1-2 As shown, a rope-driven series manipulator provided by the present invention includes a main driving rope 1, a main driving sheave 206, a driving rope 203 inside the unit, and multi-stage unit joints; The bottom of each unit joint is symmetrically provided with at least two main drive sheaves 206; each main drive sheave 206 is wound with a unit internal drive rope 203, and the end of the unit internal drive rope 203 is connected to the next There are at least two main driving ropes 1, and each main driving rope 1 is wound on the corresponding main driving sheave 206 in sequence.
[0026] The unit joint includes a unit base and a unit support arranged on the unit base. The main driving sheave 206 is arranged on the unit ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More