

Flexible bionic manipulator
A manipulator and flexible technology, applied in the field of robotics, can solve problems such as low flexibility, single control mode, and limited application range, and achieve the effects of strong structural flexibility, improved practicability, and improved versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
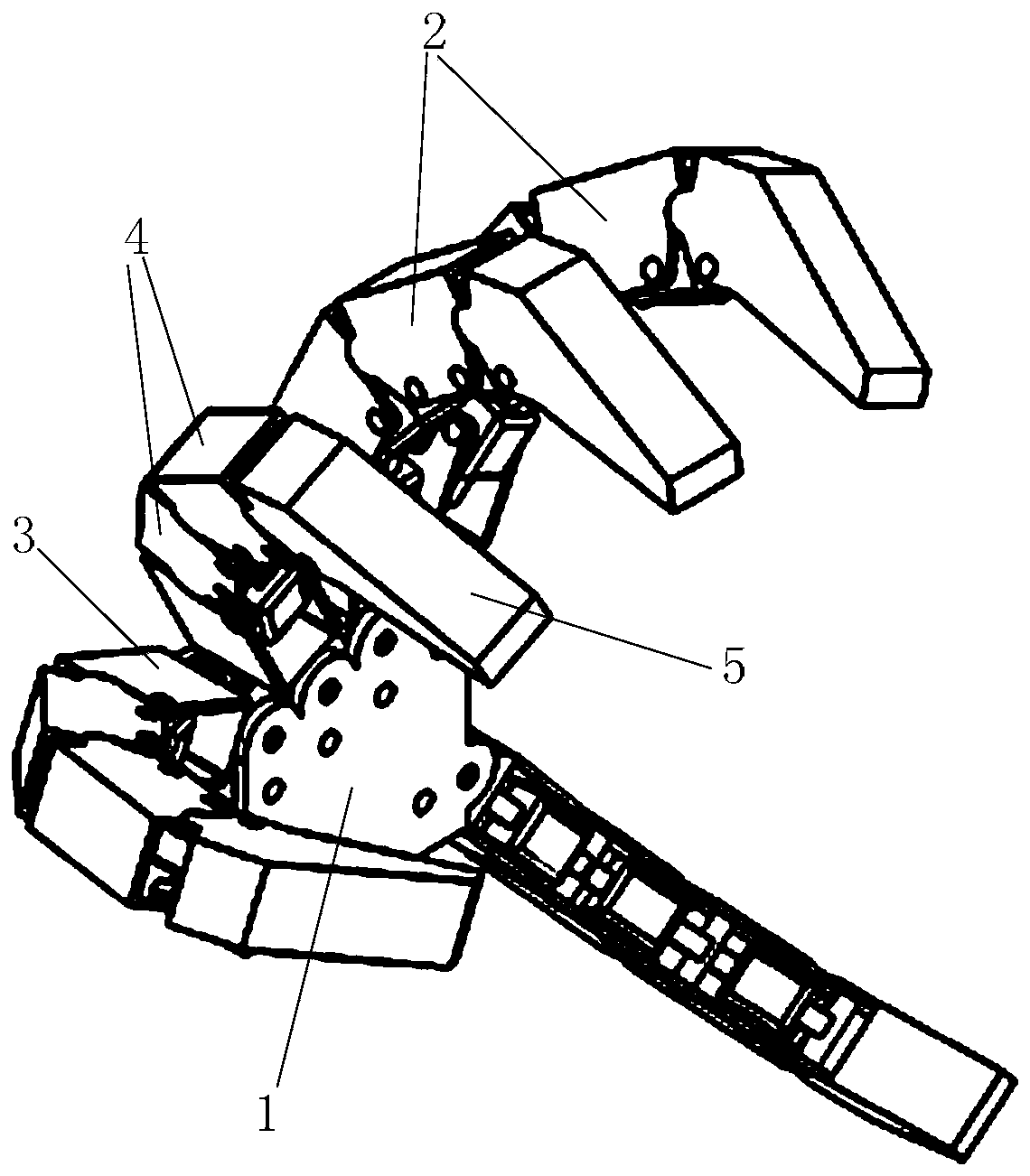
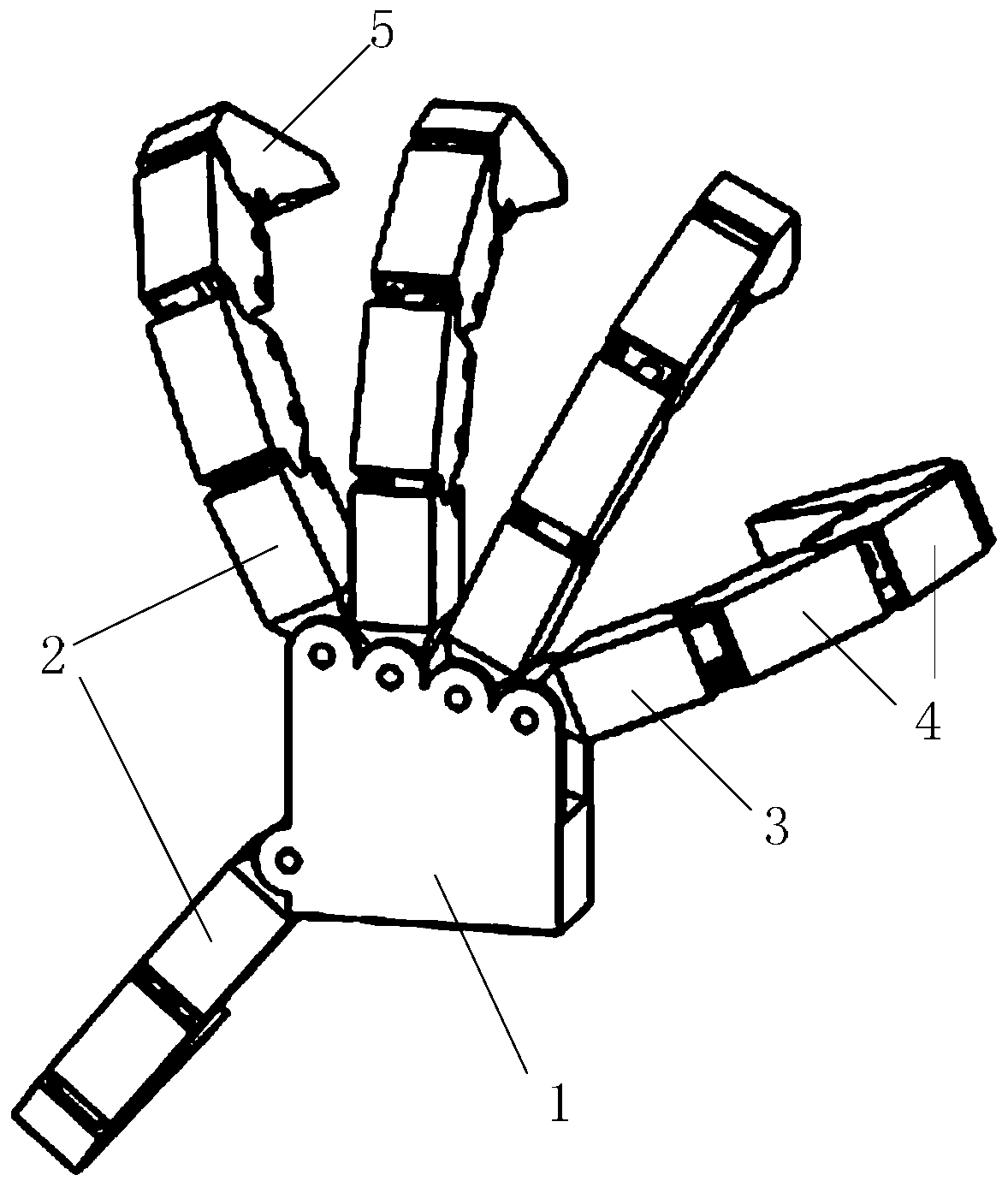
[0031] Such as Figure 1 to Figure 8 As shown, the flexible bionic manipulator of the present invention includes a palm 1, five fingers 2 rotatably connected to the palm 1, and a driving device, wherein the five fingers 2 are in a parallel structure, and each finger 2 is composed of a root unit 3, Two knuckle units 4 and fingertip units 5 are formed in series through the rotation shaft; in each finger 2, between the root unit 3 and the knuckle unit 4, between the knuckle unit 4 and between the knuckle unit 4 and the finger The tip units 5 are all driven by a driving device, so that the base unit 3 and the knuckle unit 4 move mutually, the knuckle units 4 move mutually, and the knuckle unit 4 and the fingertip unit 5 move mutually, realizing Finger 2 is bent or straightened.
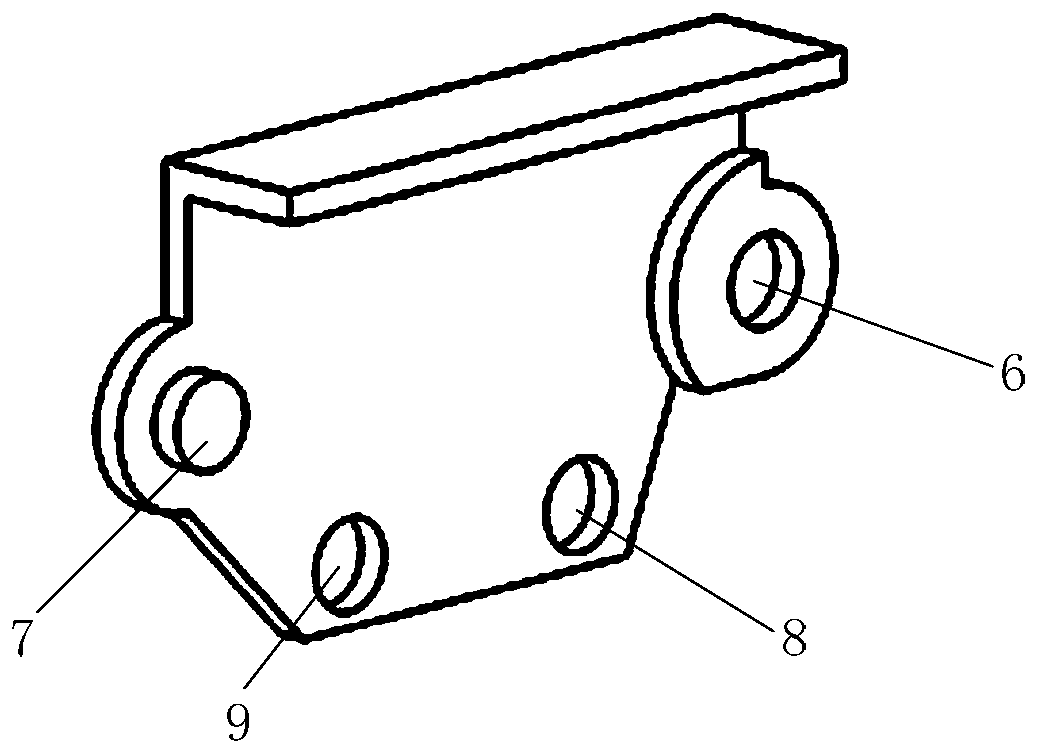
[0032] Specifically, each phalanx unit 4 comprises a phalanx shell, and one end of the phalanx shell is provided with a hole 6 connected with the adjacent finger root unit 3, phalanx unit 4 or fingertip ...
Embodiment 2
[0041] The only difference between this embodiment and Embodiment 1 is that in actual use, the position of the fingers on the palm, the number of fingers, the number of units connected in series in each finger, and fingertip units of various shapes can all be adjusted according to requirements. Free combination makes the bionic manipulator have various functions and can meet the needs of various usage occasions.
[0042] Other structures of this embodiment are consistent with Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More