High-precision AGV position sensing method based on binocular laser
A high-precision, laser sensor technology, used in measuring devices, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0090] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
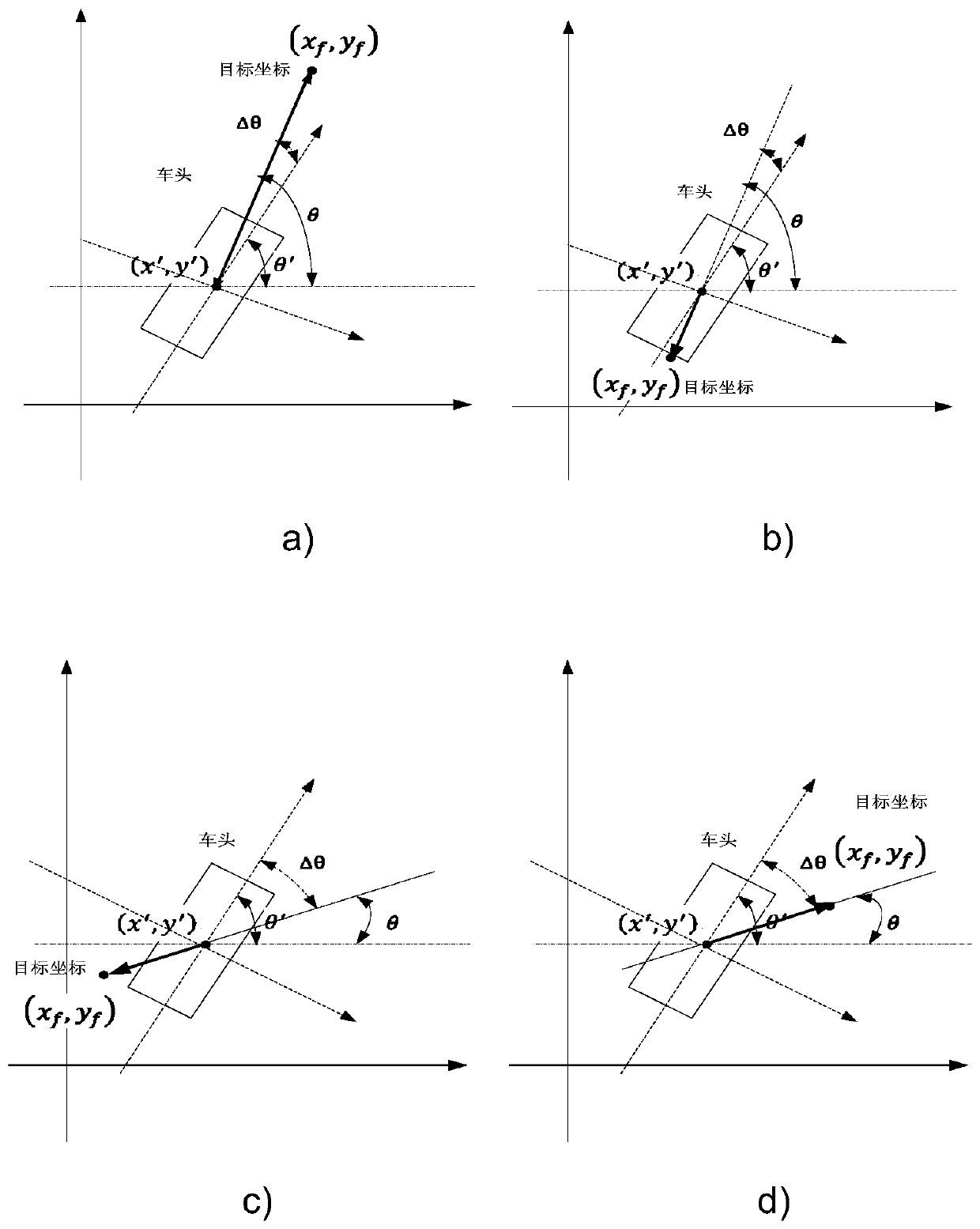
[0091] Such as Figure 4 Shown, the inventive method is specifically as follows:
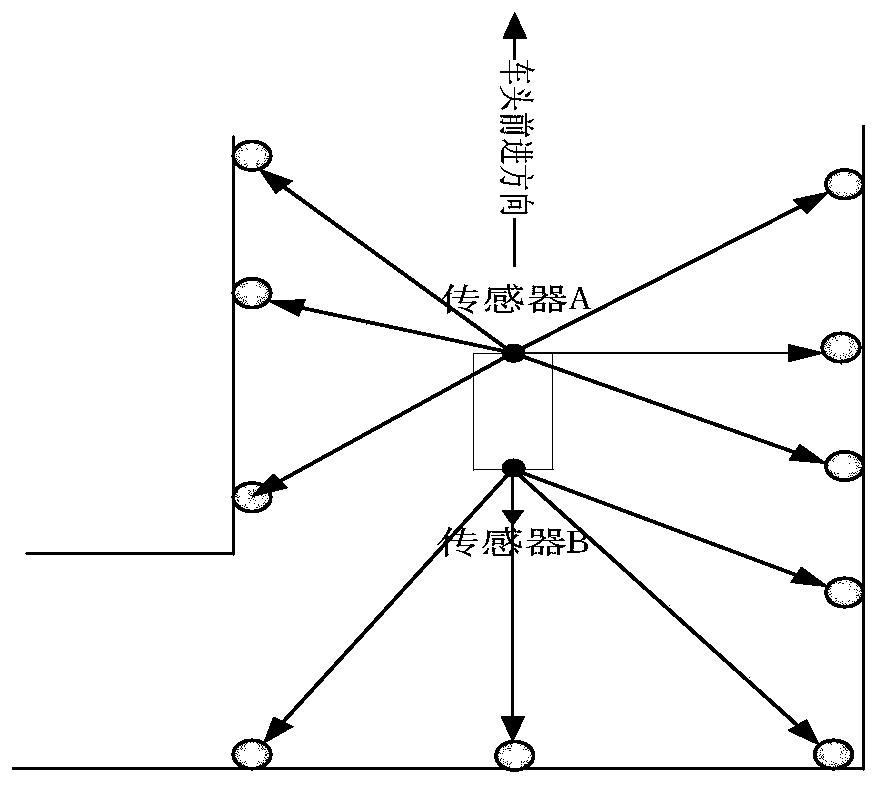
[0092] 1) Install a laser sensor on the central axis of the front and rear top of the AGV (Automated Guided Vehicle), such as figure 1 Install reflectors within the AGV driving path and laser scanning range, and ensure that no less than 3 reflectors can be scanned each time the AGV is driving. After the installation is complete, perform calibration and set the initial coordinate 0° angle orientation.
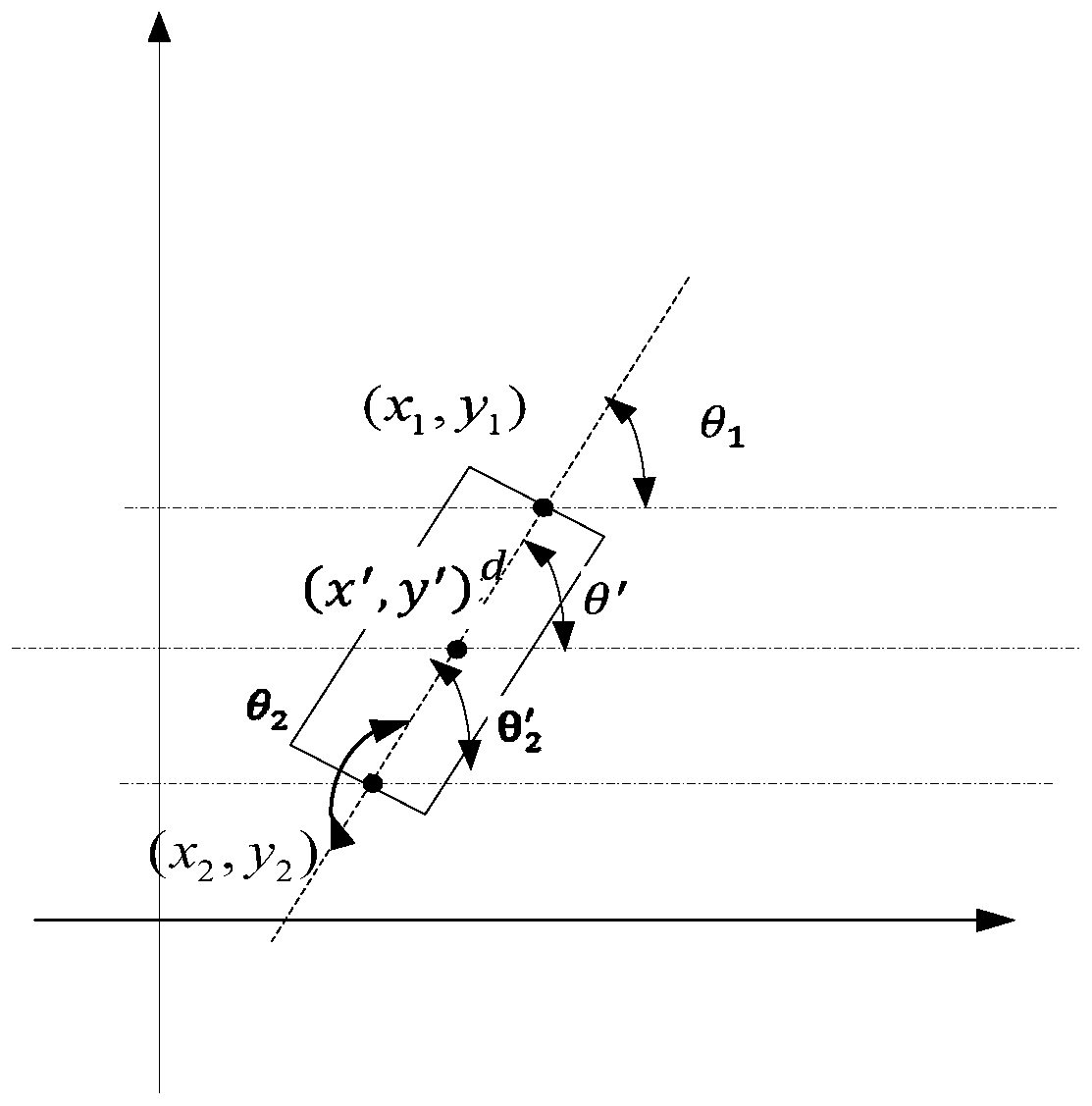
[0093] 2) When the AGV is running, the navigation controller collects the current pose information of the sensor in real time through the serial port / network port. Such as figure 2 Shown is a schematic diagram of the relationship between the sensor coordinates and the center coordinates of the AGV car body. The center of the sensor and the center of the car bod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com