

Smooth constraint unscented Kalman filtering method and target tracking method
An unscented Kalman, smooth constraint technology, applied in the field of target tracking, can solve problems such as no specific solutions are proposed, and achieve the effect of avoiding Jacobian calculation, improving computing efficiency, and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
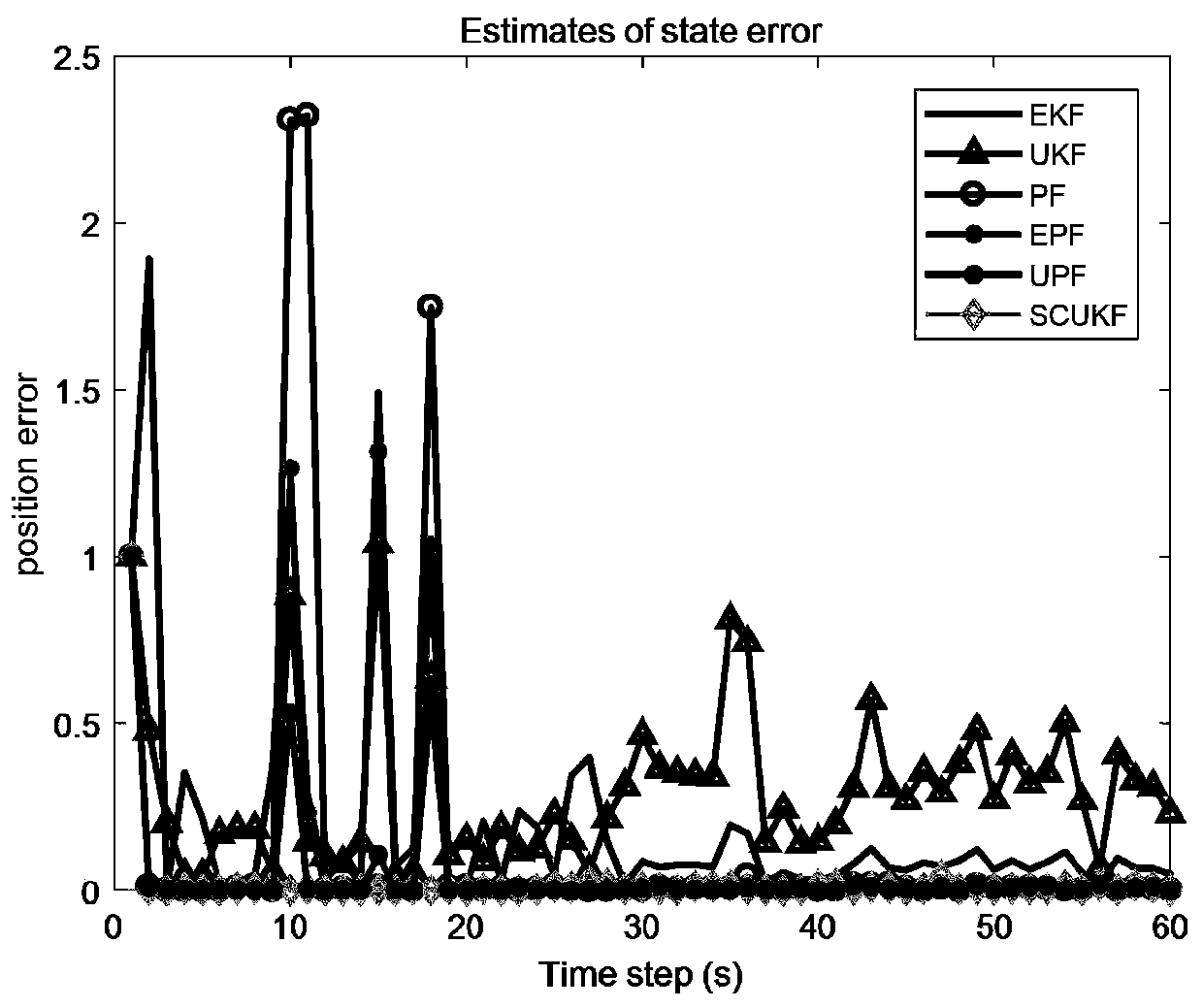
[0055] Nonlinear dynamical systems estimate the state of objects from noise-corrupted measurement data. Measurement nonlinearity and uncertainty are two major interrelated challenges. The first-order extended Kalman filter (EKF) is widely used in nonlinear filtering. This method is based on the idea of Taylor series and is easy to implement. Due to the inevitable estimation error caused by linearization, for strongly nonlinear dynamic systems, the estimation performance of EKF decreases and divergence may occur. The Unscented Kalman Filter (UKF) algorithm uses Gaussian points to approximate the posterior distribution, avoiding the linearization calculation of nonlinear functions, and estimating the mean and covariance more accurately. Particle filter (PF) can effectively solve non-Gaussian and nonlinear filtering problems. The basic idea is to completely represent the posterior distribution of the estimated state in an online manner through weighted sampling particles. ques...
Embodiment 2
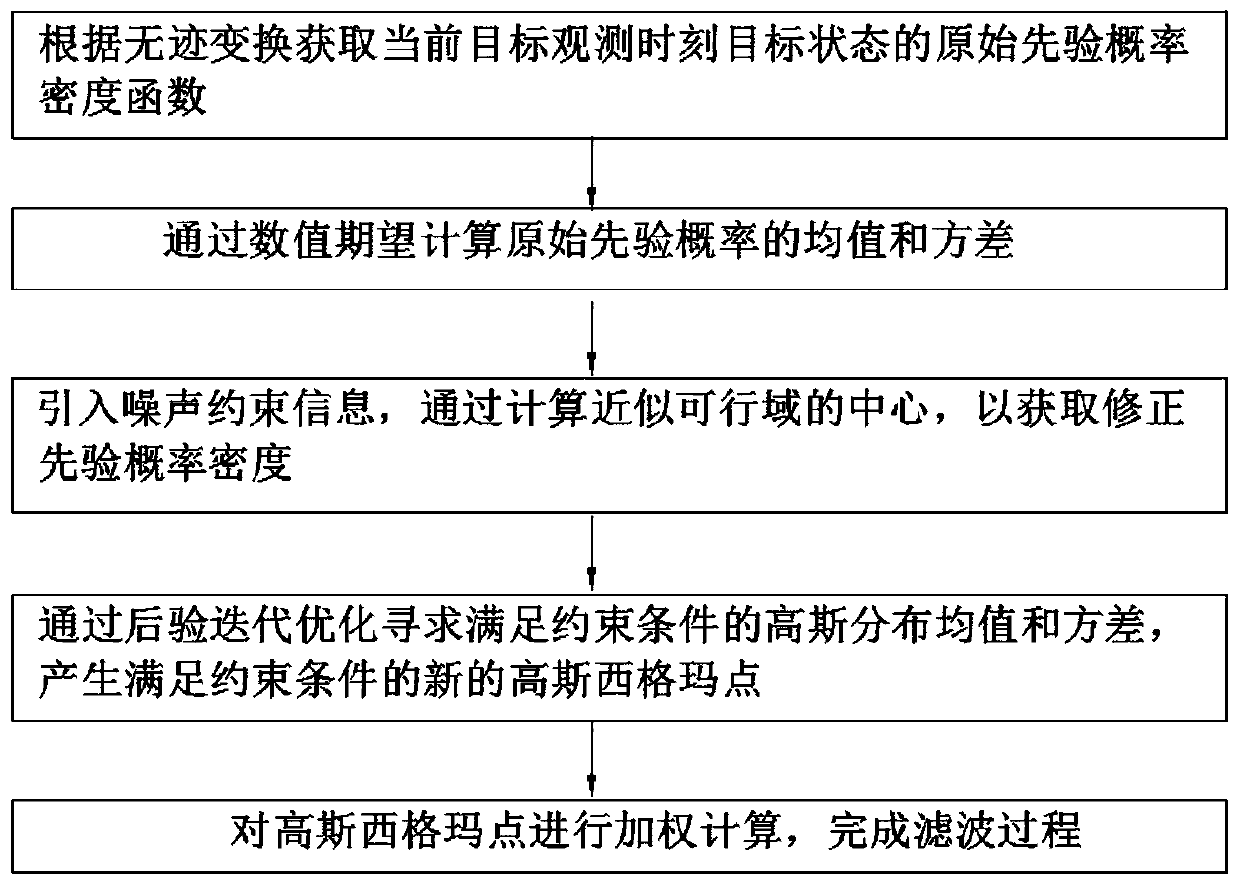
[0094] like Figure 5 As shown, corresponding to the smooth constrained unscented Kalman filtering method described in Embodiment 1, this embodiment provides a target tracking method, which includes the following steps:
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More