

Wire-driven horizontal lower limb rehabilitation robot
A rehabilitation robot and cable-driven technology, applied in the field of robotics, can solve problems such as the inability to realize the forward and backward movement and opening and closing movement of the legs, the inability to meet the requirements of rehabilitation training, and the inability to simulate the actual movement of the legs. , to achieve good rehabilitation effect, good maintainability and low manufacturing cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
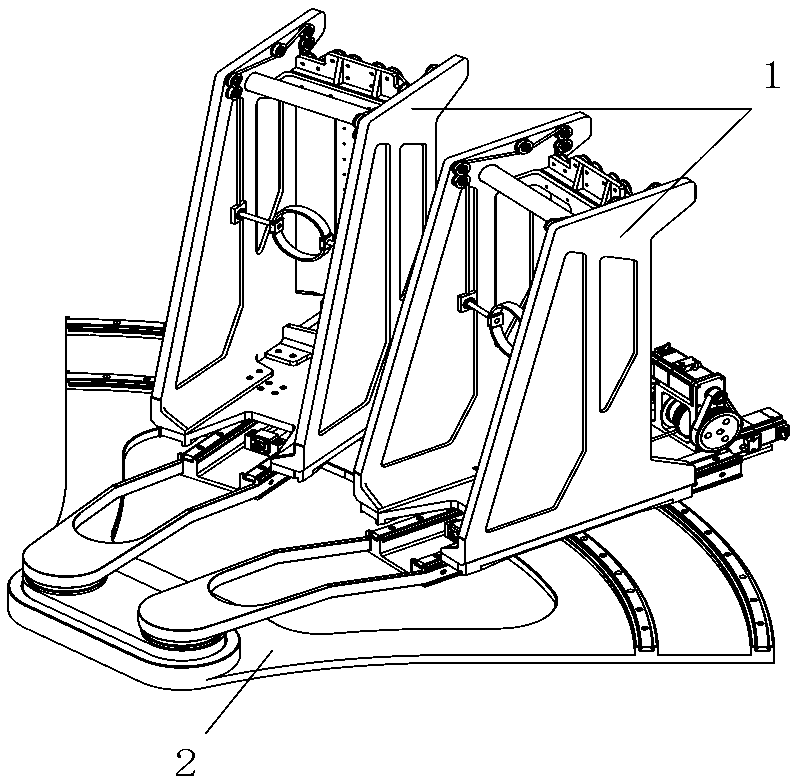
[0044] See figure 1 , A cord-driven horizontal lower limb rehabilitation robot includes a pair of foot fixing mechanism 1 and a support mechanism 2.
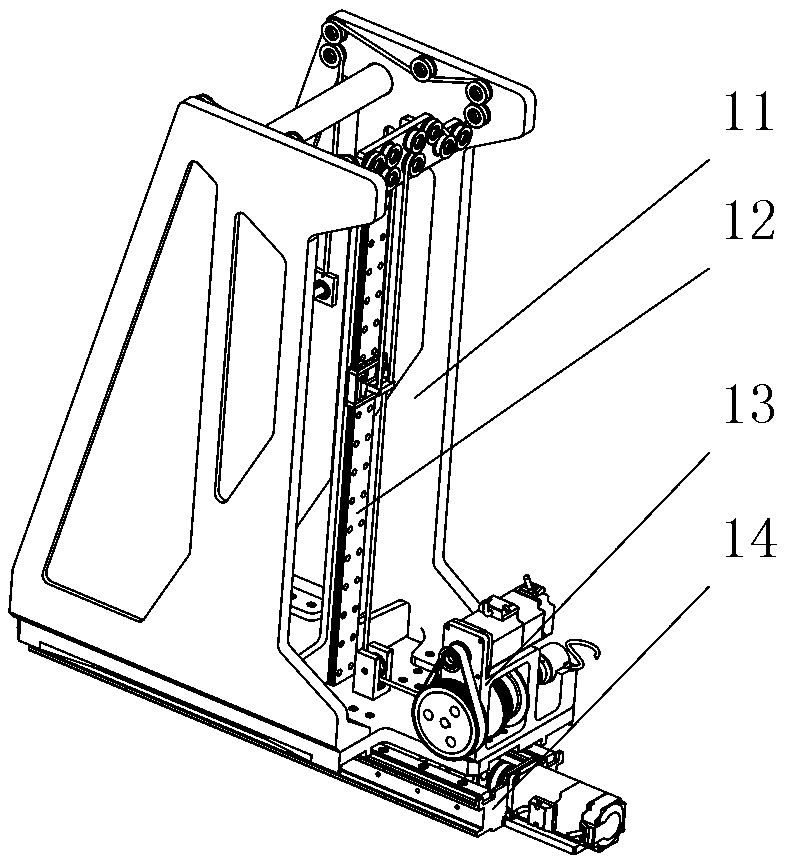
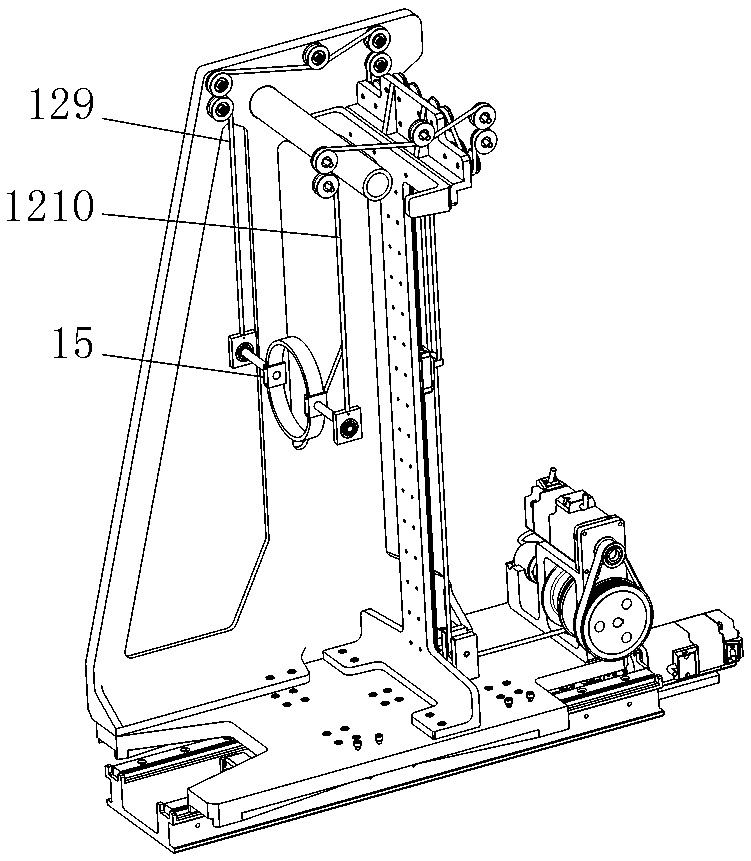
[0045] See figure 2 with image 3 , The foot fixing mechanism 1 includes a foot frame 11, a flexible cable guide mechanism 12, a vertical drive mechanism 13, a horizontal drive mechanism 14 and an ankle placement mechanism 15.
[0046] See Figure 4 , The foot frame 11 includes a bottom plate 111, a pair of side plates 113 and an I-shaped bracket 112; a pair of side plates 113 are fixedly installed on the bottom plate 111 in parallel and upright, and the I-shaped bracket 112 is installed between the pair of side plates 113 The middle of the bottom plate 111; the front of the I-shaped bracket 112 corresponds to the front of the bottom plate 111, and the back of the I-shaped bracket 112 corresponds to the rear of the bottom plate 111. A cross bar 115 and a tensioner bracket 114 are fixedly installed between the upper parts of the pair...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More