

Robot safety protection method, device and system
A safety protection device and safety protection technology, applied in the field of robots, can solve problems such as dangerous accidents of robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
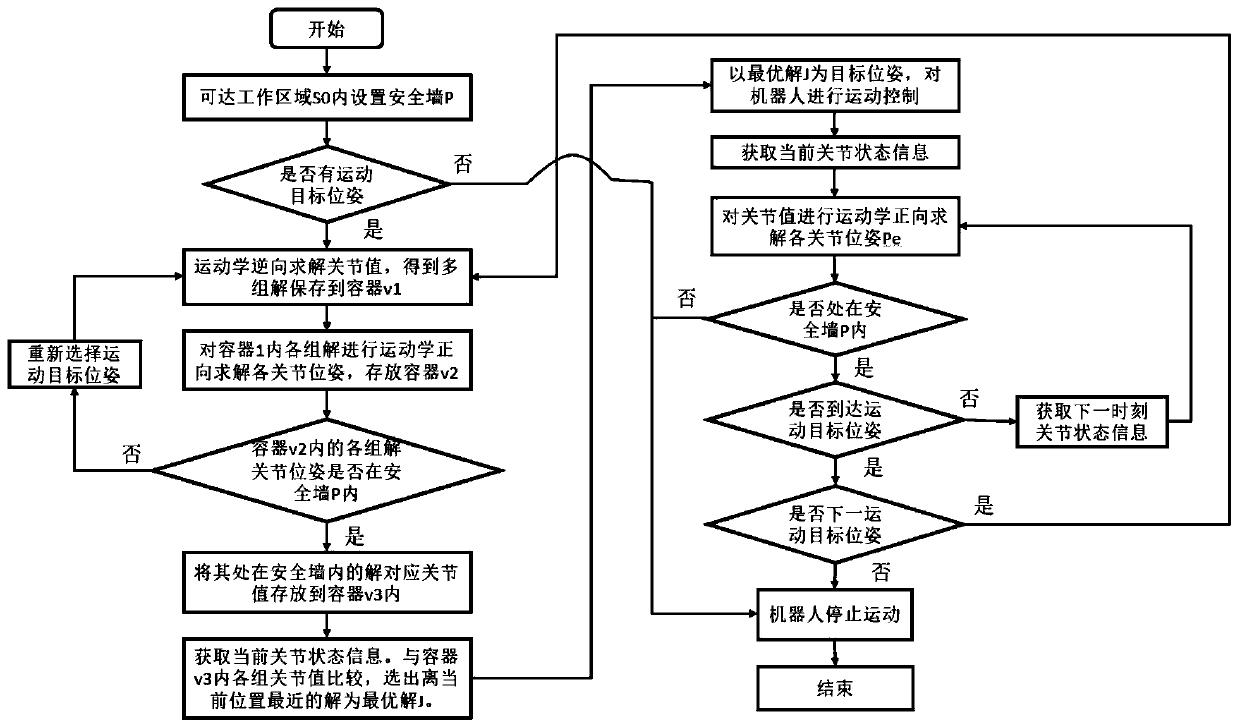
[0080] An embodiment of the present invention provides a robot safety protection method, which specifically includes the following steps:
[0081] (1) Obtain the target joint value of each joint of the robot based on the moving target of the robot;
[0082] (2) Obtain the target pose of each joint of the robot based on the target joint value of each joint;
[0083] (3) When it is judged that the robot is in the set safe area based on the target pose of each joint, the target joint value of each joint is saved;
[0084] (4) With the goal of the robot reaching the moving target and the constraint that each joint of the robot is within the set safe area, the current joint state information corresponding to the current state of the robot is compared with the target joint value of each joint, and the calculation is performed continuously. Find the optimal joint value of each joint closest to the current state, and send corresponding control information to the robot based on the op...
Embodiment 2
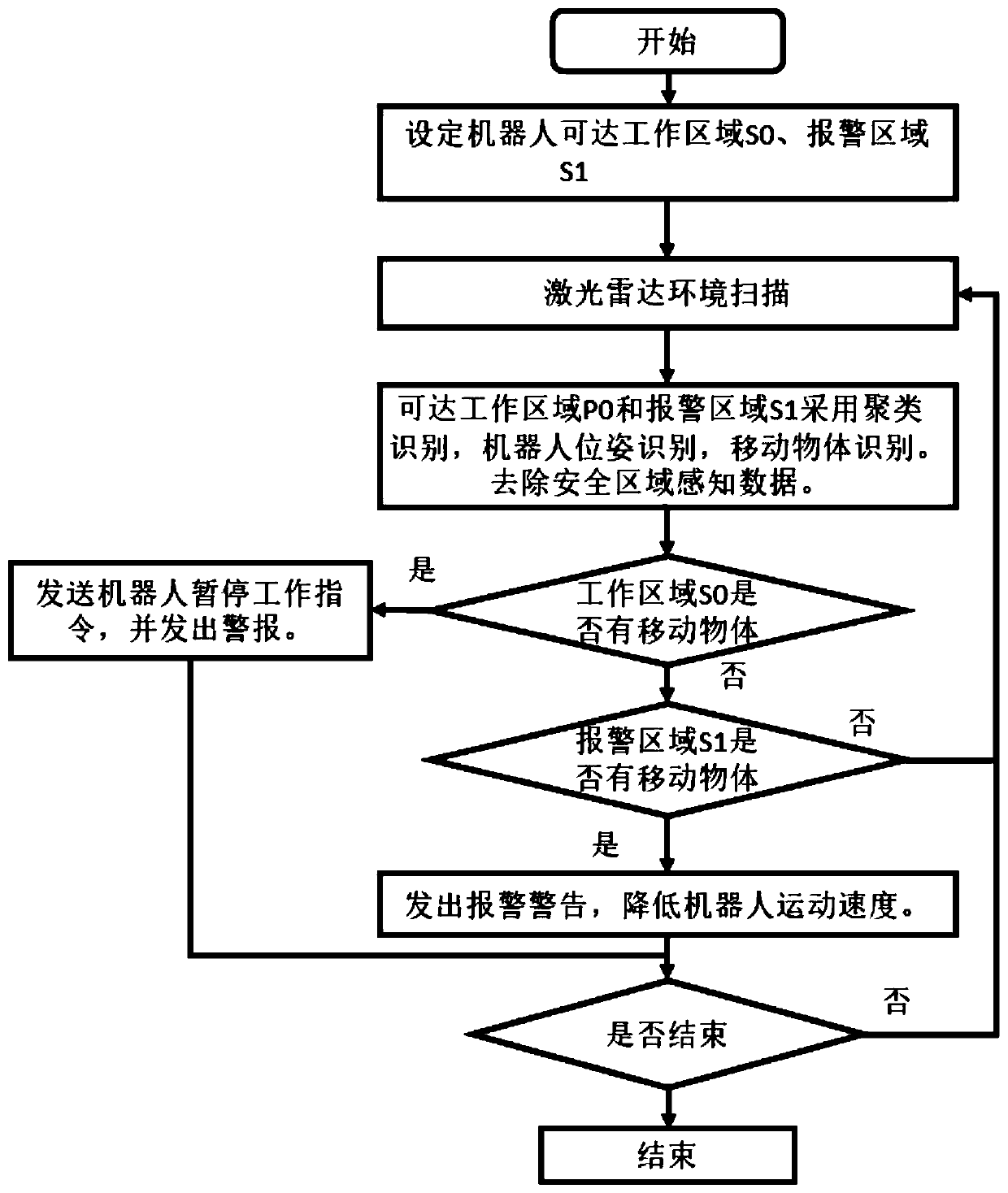
[0105] Based on Example 1, such as figure 2 Shown, the difference between the implementation of the present invention and embodiment 1 is:
[0106] Also include before the step of obtaining the target joint value of each joint of the robot based on the moving target of the robot:
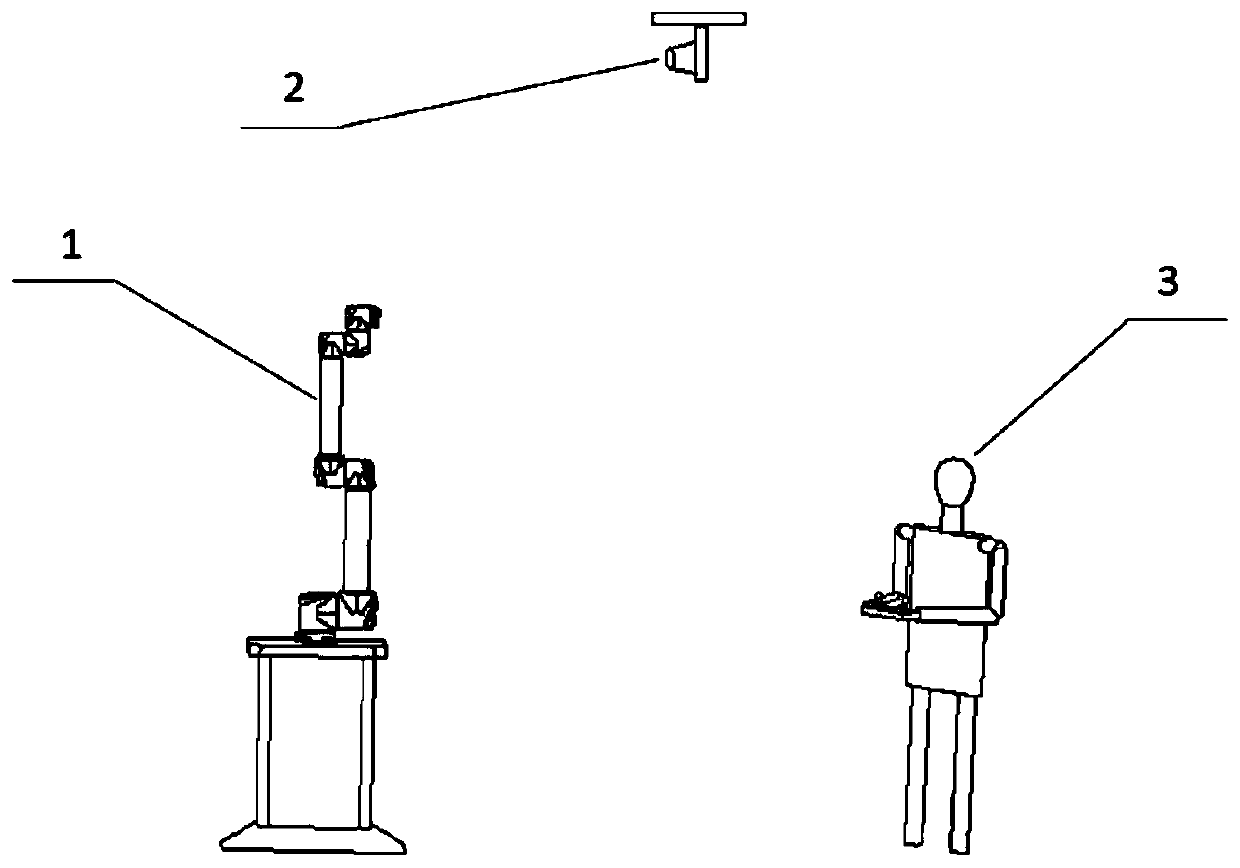
[0107] Obtain the reachable working area of the robot;
[0108] When it is judged that there is a moving object intruding in the reachable working area, a control command is sent to the robot to make the robot suspend its work.
[0109] Further, before the step of obtaining the target joint value of each joint of the robot based on the moving target of the robot, it also includes:
[0110] Obtain an alarm area of the robot, the alarm area is wrapped outside the accessible working area;
[0111] When it is judged that there is no moving object intruding in the reachable working area, and there is moving object intruding in the alarm area, a control command is sent to the robot, so that the ro...
Embodiment 3
[0118] Based on the same inventive concept as in Embodiment 1, a robot safety protection device is provided in the embodiment of the present invention, including:
[0119] The first calculation module is used to obtain the target joint value of each joint of the robot based on the moving target of the robot;
[0120] The second calculation module is used to obtain the target pose of each joint of the robot based on the target joint value of each joint;
[0121] The first judging module is used to save the target joint value of each joint when it is judged that the robot is located in the set safe area based on the target pose of each joint;
[0122] The control module is used to take the robot's arrival at the moving target as the goal, and take the joints of the robot within the set safe area as the constraint, and continuously perform the comparison between the current joint state information corresponding to the current state of the robot and the target joint value of each ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More