Servo control device
A servo control device and mechanical technology, applied in the field of servo control devices for target tracks, can solve problems such as change in correction amount, inability to uniquely determine correction amount, mechanical vibration, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
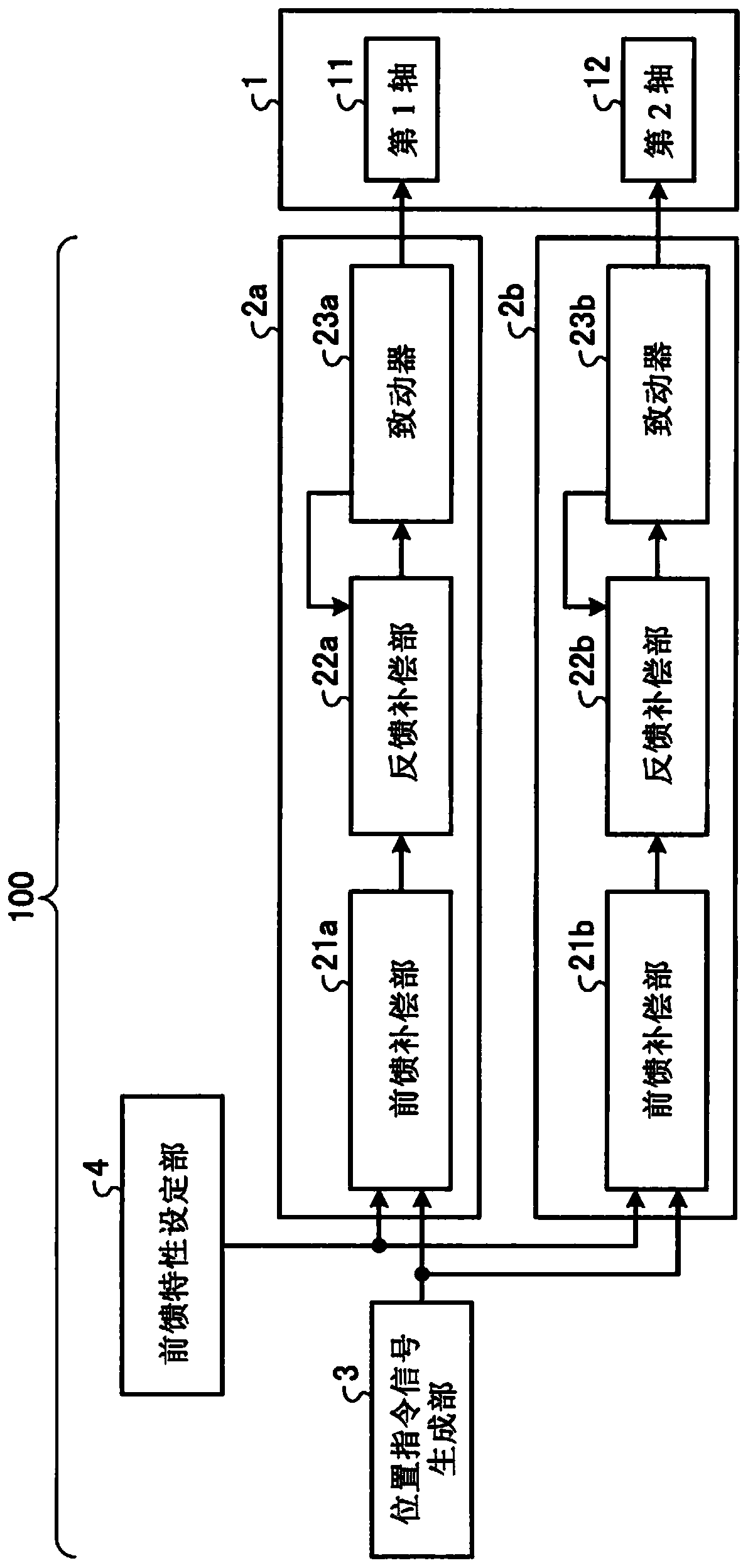
[0027] figure 1 It is a block diagram showing a schematic configuration of the servo control device 100 according to Embodiment 1 of the present invention. The servo control device 100 takes a machine having one or more drive shafts as a control object and performs trajectory following control, which controls the mechanical end of the machine to follow a set target trajectory with high precision. Here, the machine to be controlled by the servo control device 100 is the horizontal articulated robot 1 . The servo control device 100 includes a first-axis servo control unit 2 a , a second-axis servo control unit 2 b , a position command signal generation unit 3 , and a feedforward characteristic setting unit 4 . The first-axis servo control unit 2 a and the second-axis servo control unit 2 b drive and control the horizontal articulated robot 1 .
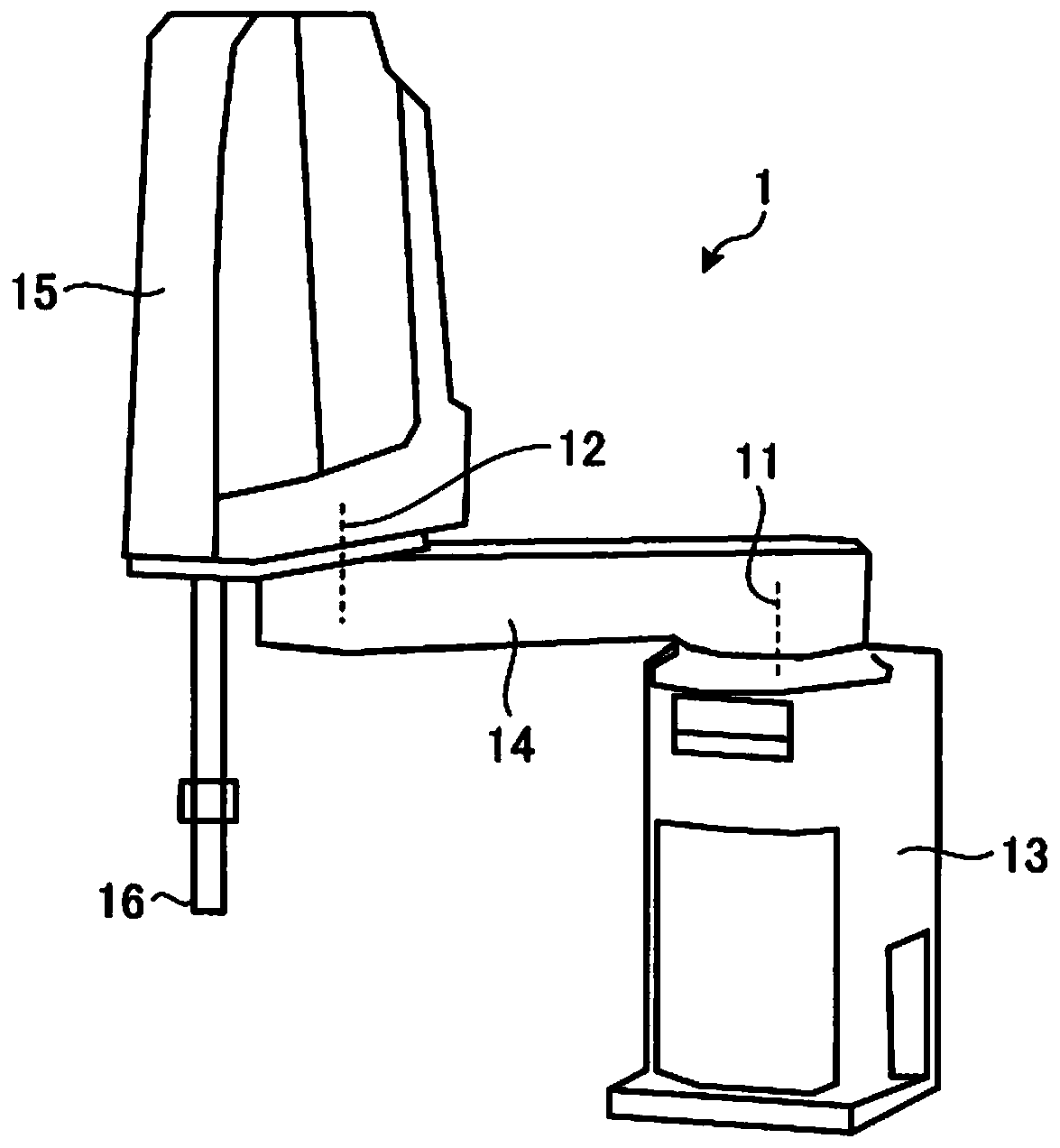
[0028] figure 2 It is a schematic diagram showing the horizontal articulated robot 1 according to the first embodiment. The horizo...
Embodiment approach 2
[0093] Figure 8 It is a block diagram showing a schematic configuration of the servo control device 200 according to Embodiment 2 of the present invention. The servo control device 200 includes a first-axis servo control unit 2a', a second-axis servo control unit 2b', a position command signal generation unit 3, and a feedforward characteristic setting unit 4. The first-axis servo control unit 2a' and the second-axis servo control unit 2b' drive and control the horizontal articulated robot 1 .
[0094] The difference between the servo control device 200 according to the second embodiment and the servo control device 100 according to the first embodiment is that the first axis servo control unit 2 a ′ and the second axis servo control unit 2 b ′ are different from the first axis servo control unit 2 a ′. 2a and the second axis servo control unit 2b are different. That is, in the first axis servo control unit 2a', the vibration suppression compensation unit 24a is added betwe...
Embodiment approach 3
[0105] Figure 10 It is a block diagram showing a schematic configuration of the servo control device 300 according to Embodiment 3 of the present invention. The servo control device 300 includes a first-axis servo control unit 2a, a second-axis servo control unit 2b, a position command signal generation unit 3, and a feedforward characteristic setting unit 4a. The first-axis servo control unit 2 a and the second-axis servo control unit 2 b drive and control the horizontal articulated robot 1 .
[0106] The servo control device 300 according to the third embodiment differs from the servo control device 100 according to the first embodiment in that the feedforward characteristic setting unit 4 a is different from the feedforward characteristic setting unit 4 . The transfer functions set by the feedforward characteristic setting unit 4 a and the transfer function set by the feedforward characteristic setting unit 4 for each of the feedforward compensation units 21 a and 21 b ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More