

Method for pre-judging collision possibility of unmanned vehicle and surrounding vehicles
An unmanned vehicle and vehicle technology, which is applied in the field of collision possibility prediction between unmanned vehicles and surrounding vehicles, can solve problems such as low accuracy, low efficiency, and complex methods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0108] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
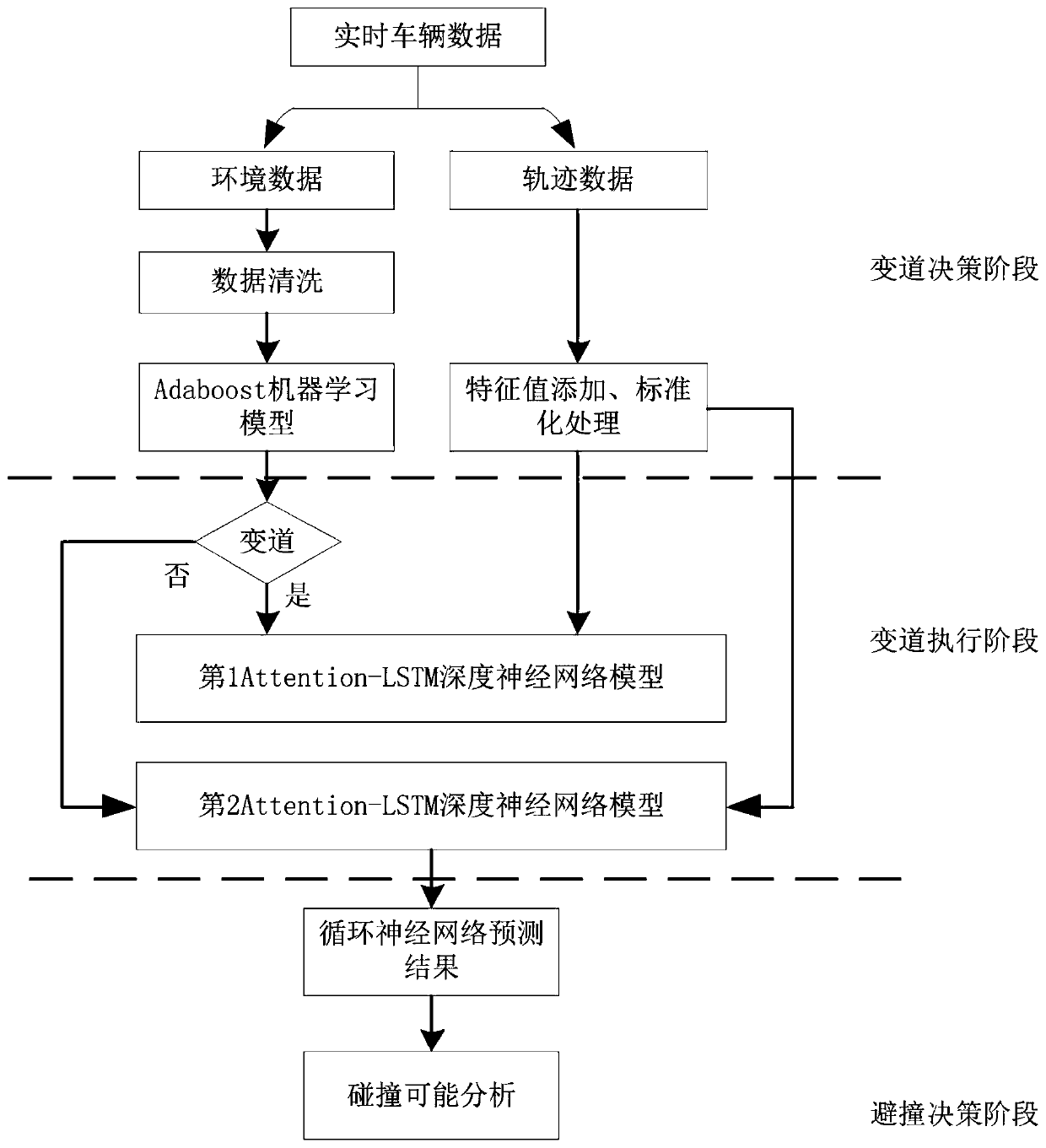
[0109] like figure 1 As shown, the method for predicting the possibility of collision between an unmanned vehicle and surrounding vehicles of the present invention is characterized in that it comprises the following steps:
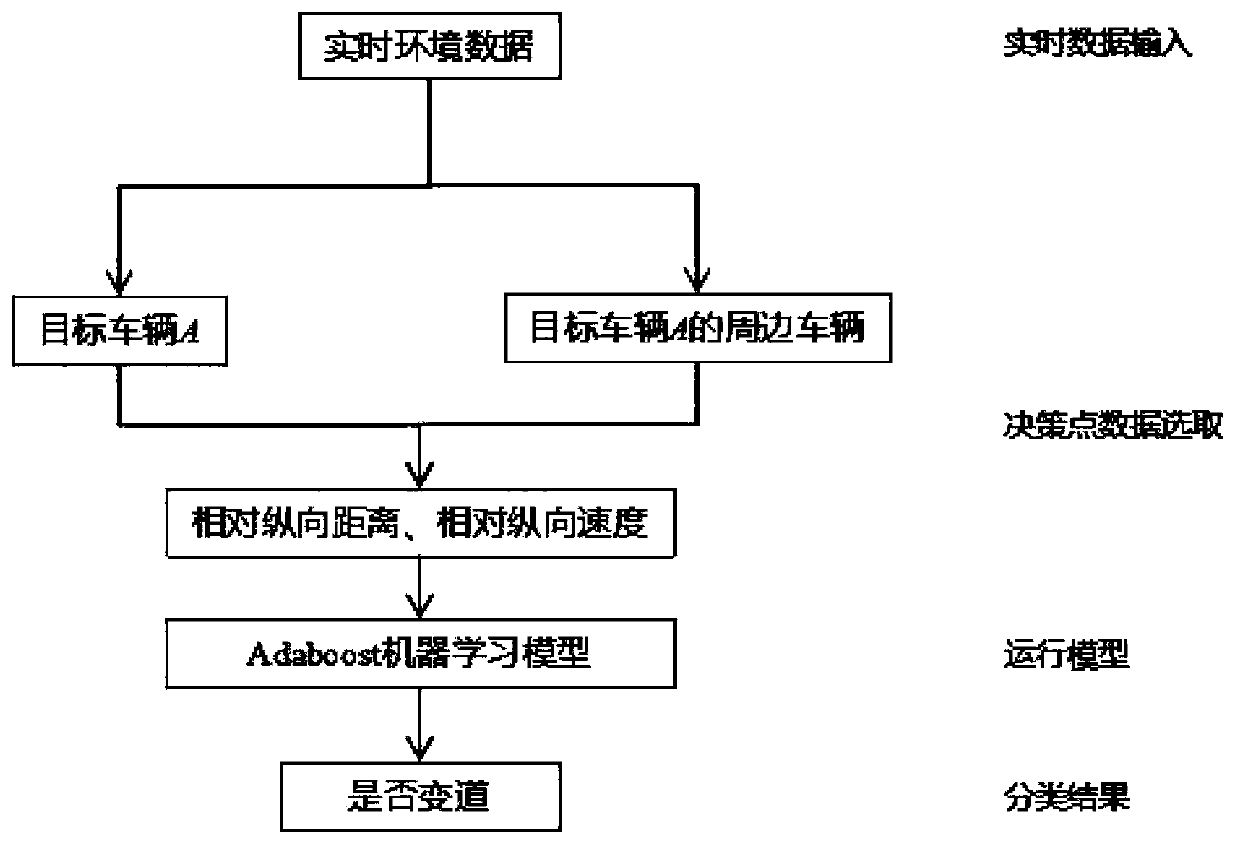
[0110] Step 1: Obtain the trajectory data and environmental data of the unmanned vehicle during driving: obtain the trajectory data set of the target vehicle A in real time as P={P 1 ,P 2 ,...,P i ,...,P I}, the environment data set is E={E 1 ,E 2 ,...,E i ,...,E I}; wherein, the target vehicle A is an unmanned vehicle A * The distance between the unmanned vehicle A in the adjacent lane * nearest vehicle ahead; Pi is the trajectory data of the target vehicle A at the i-th time point, the time interval between two adjacent time points is d=0.1s, I is the total number of time points in the trajectory, and the traject...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More