

Automatic guided vehicle (AGV) forklift type intelligent carrying robot and working method thereof
A robot and forklift-type technology, which is applied in the field of AGV forklift-type intelligent carrying robot, can solve the problems of unsafe cargo transportation, horizontal orientation, economic loss, etc., and achieve the effect of improving service life, facilitating height control, and ensuring transportation safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical solutions of the present invention will be clearly and completely described below in conjunction with the embodiments. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
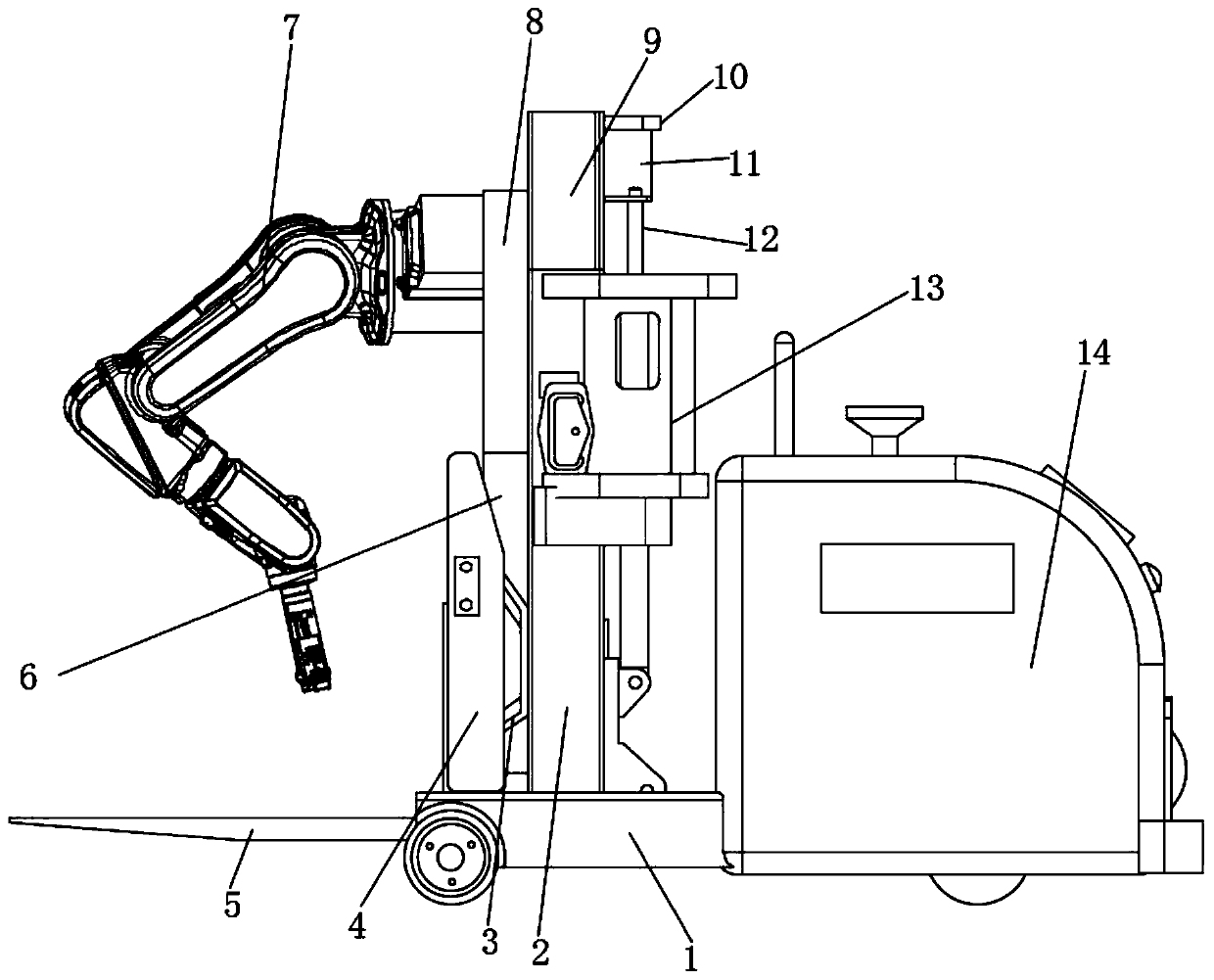
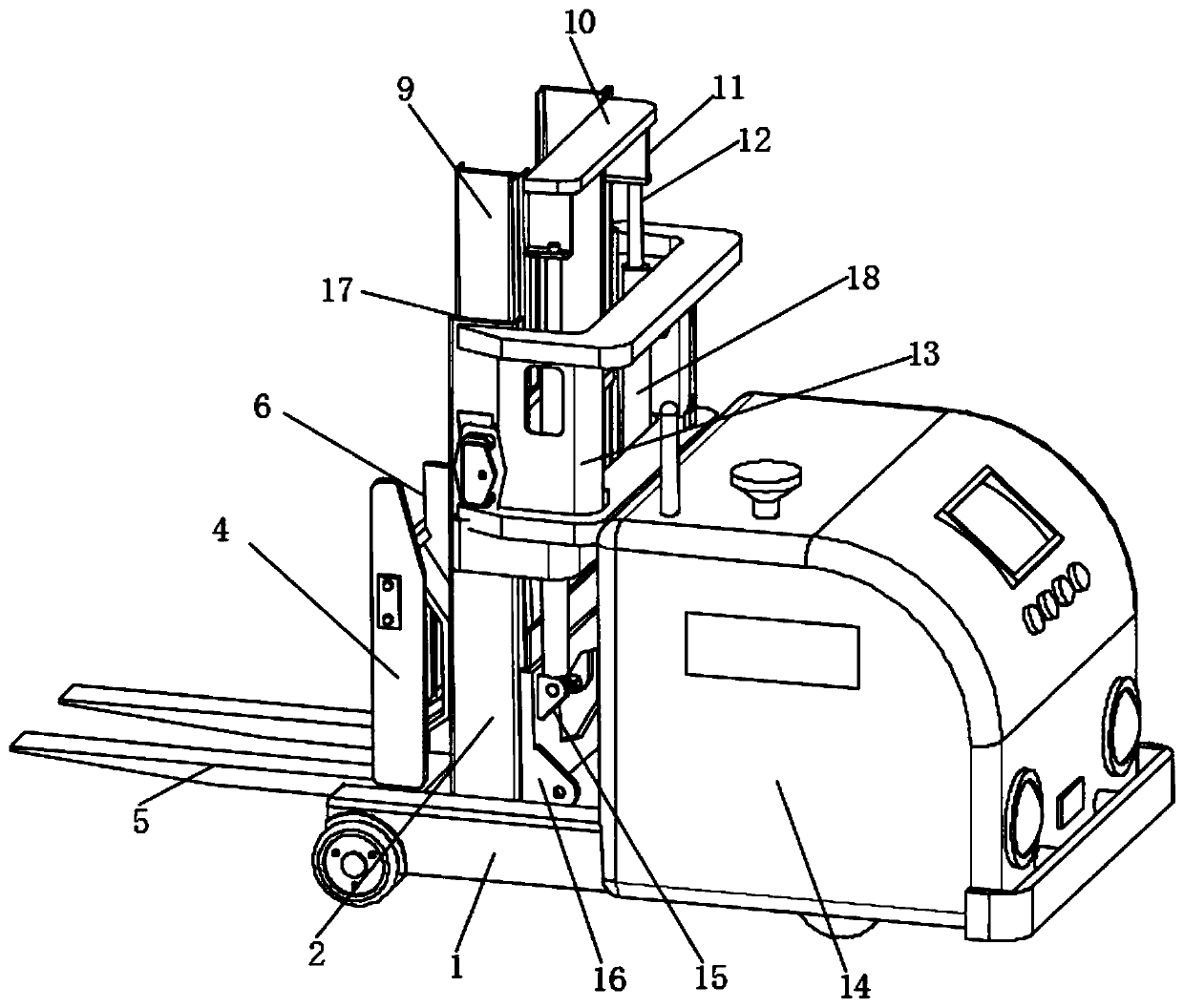
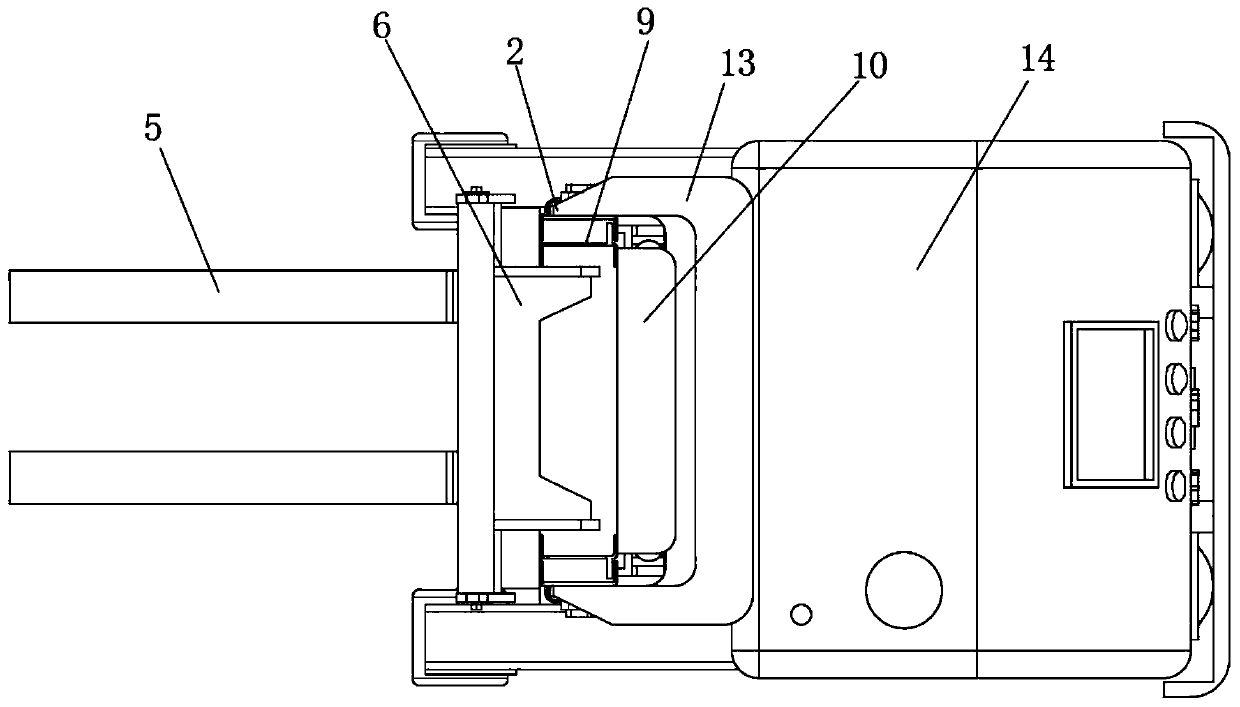
[0034] Such as Figure 1-6 As shown, an AGV forklift type intelligent carrying robot includes a car board 1 and a control room 14. The top end of the car board 1 is provided with a control room 14, and the car board 1 on one side of the control room 14 is provided with two supports. Column 2, the two support columns 2 are perpendicular to the top surface of the vehicle panel 1, and the bottom position between the two support columns 2 is provided with a reinforcement plate 16, and the two ends of the side wall of the reinfo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More