

3D vehicle detection method based on key point regression
A technology of vehicle detection and key points, applied in neural learning methods, instruments, biological neural network models, etc., to achieve high efficiency, strong practicability, and easy installation
Pending Publication Date: 2020-05-08
BEIJING UNION UNIVERSITY
View PDF4 Cites 5 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
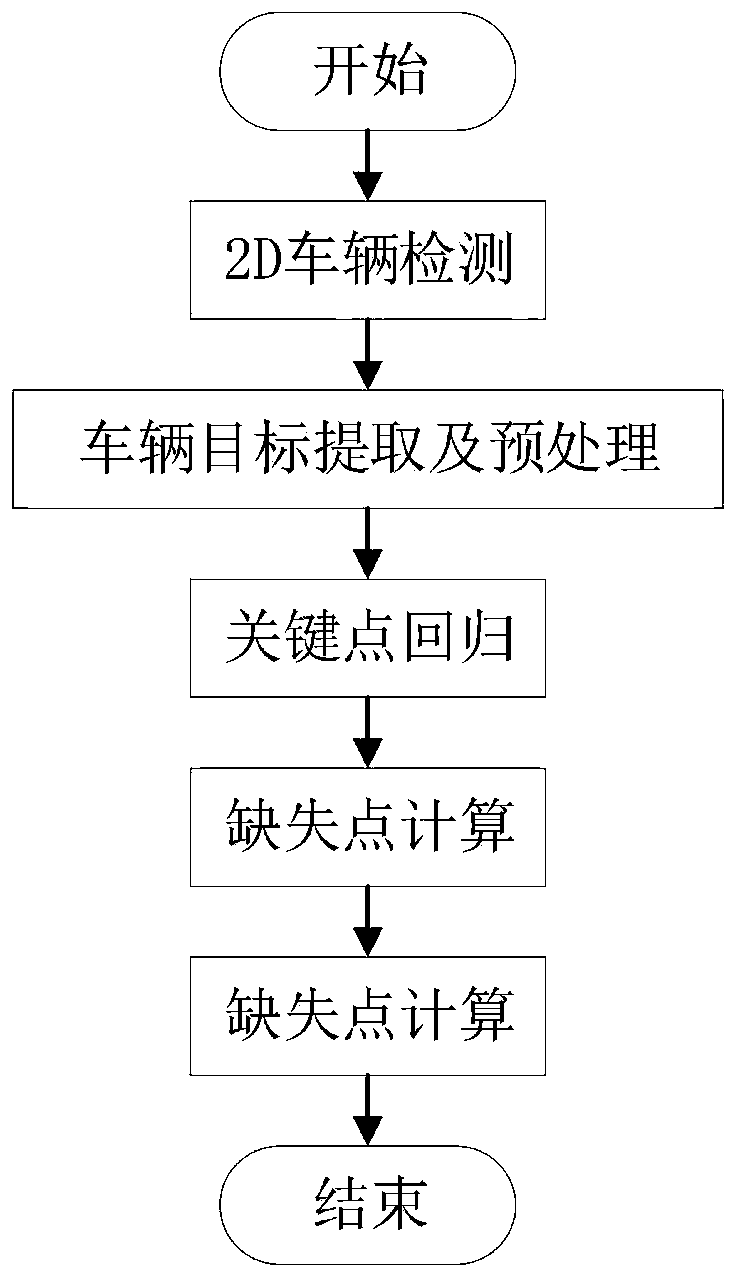
[0004] The purpose of the present invention is to solve the problem of 3D vehicle detection based on monocular vision, and propose a 3D vehicle detection method based on key point regression
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment approach
[0039] 1. Train the model according to step 1, and then detect the test picture to obtain the coordinates (844, 272, 1073, 430) of the target vehicle.
[0040] 2. Intercept the vehicle target according to the instructions in step 2 to obtain the pixel matrix P 0 :
[0041] [[[68 55 69]
[0042] [53 40 54]
[0043] [48 33 47]
[0044] ...,
[0045] [53 41 61]
[0046] [61 49 67]
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention discloses a 3D vehicle detection method based on key point regression. According to the method, 3D detection can be carried out on a front vehicle target in a driving scene so as to obtain three-dimensional information of a vehicle target; compared with a 2D vehicle target detection technology, the method has the advantages that richer scene information and higher-precision basic data can be provided for an automatic driving vehicle decision-making system, the decision-making system is helped to make more accurate judgment, and the safety of the automatic driving vehicle is improved. Therefore, the method has a wide application prospect. Compared with other 3D vehicle detection methods, the method has the advantages that pixel depth, radar and other data are not needed, onlycommon RGB image information acquired by the monocular vision camera is needed, and the detection result is reliable.
Description
technical field [0001] The invention relates to a method for 3D detection of a vehicle target in a driving scene, which belongs to the field of computer vision calculation. Background technique [0002] Nowadays, driverless car technology is developing rapidly. In terms of environmental perception methods used in car driving, visual sensors can obtain higher, more accurate, and richer road scene environmental information than sensors such as ultrasound and lidar, and the price is lower. for cheap. In vision-based road scene perception and target behavior intention analysis technology, front vehicle detection is a very important link. It is the basic data necessary for the decision-making system. To make a more accurate judgment, it is necessary to perform 3D detection on the vehicle to obtain the 3D information of the target. Therefore, it is particularly important to propose a 3D vehicle detection method. [0003] A 3D vehicle detection method based on key point regressi...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G06K9/00G06K9/34G06K9/46G06N3/04G06N3/08
CPCG06N3/08G06V20/584G06V10/267G06V10/462G06V2201/08G06N3/045
Inventor刘宏哲王永森
OwnerBEIJING UNION UNIVERSITY