

Autonomous underwater robot propeller fault feature extraction method
A technology for underwater robots and fault features, which is applied to underwater ships, underwater operating equipment, instruments, etc., can solve problems affecting the difference of fault feature values, affecting the effect of fault feature values, failure of fault feature extraction, etc., to achieve enhanced Failure characteristics, the effect of easy detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
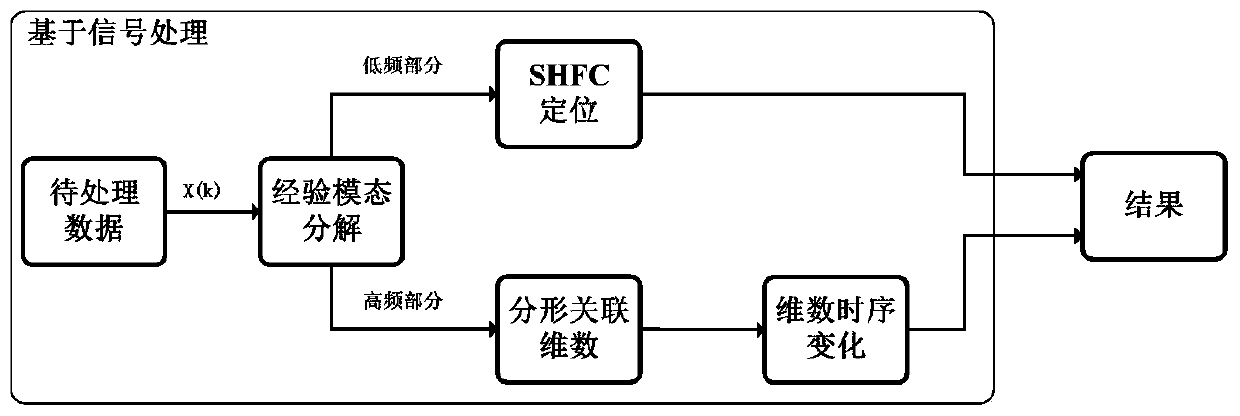
[0031] The fault feature extraction method of this patent is divided into three parts: preprocessing, high-mode partial fault feature extraction, and low-mode partial fault feature extraction. The basic process is as follows:
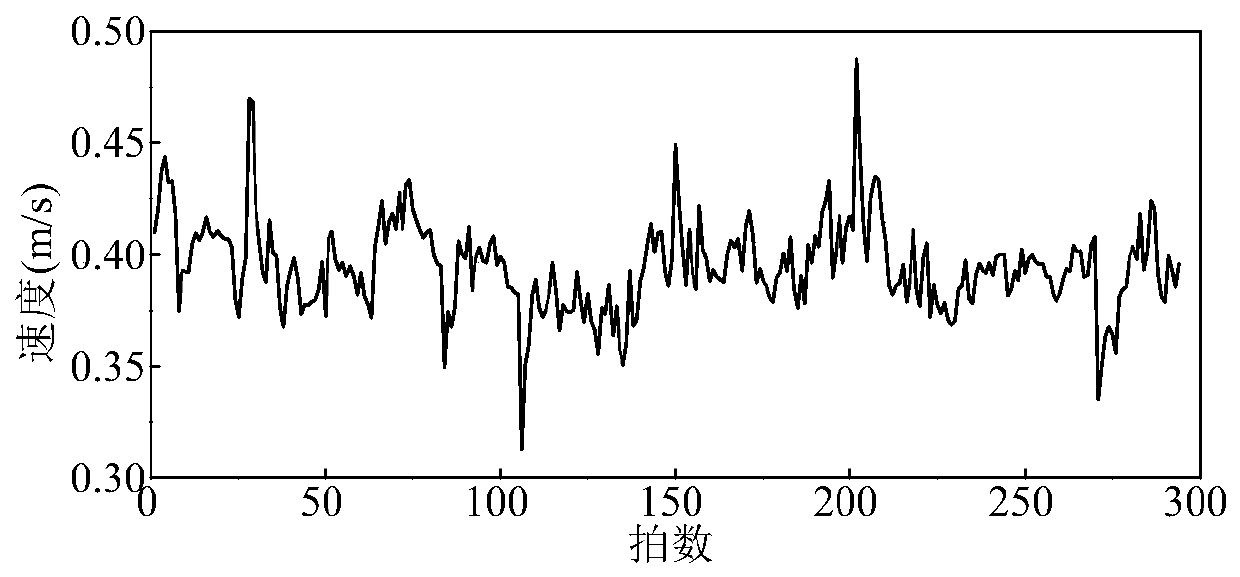
[0032] (1) Data fusion of feature quantity and state quantity, conduct empirical mode decomposition on the speed state quantity data of AUV, and decompose the original data into different modes, which are divided into low frequency mode and high frequency mode;
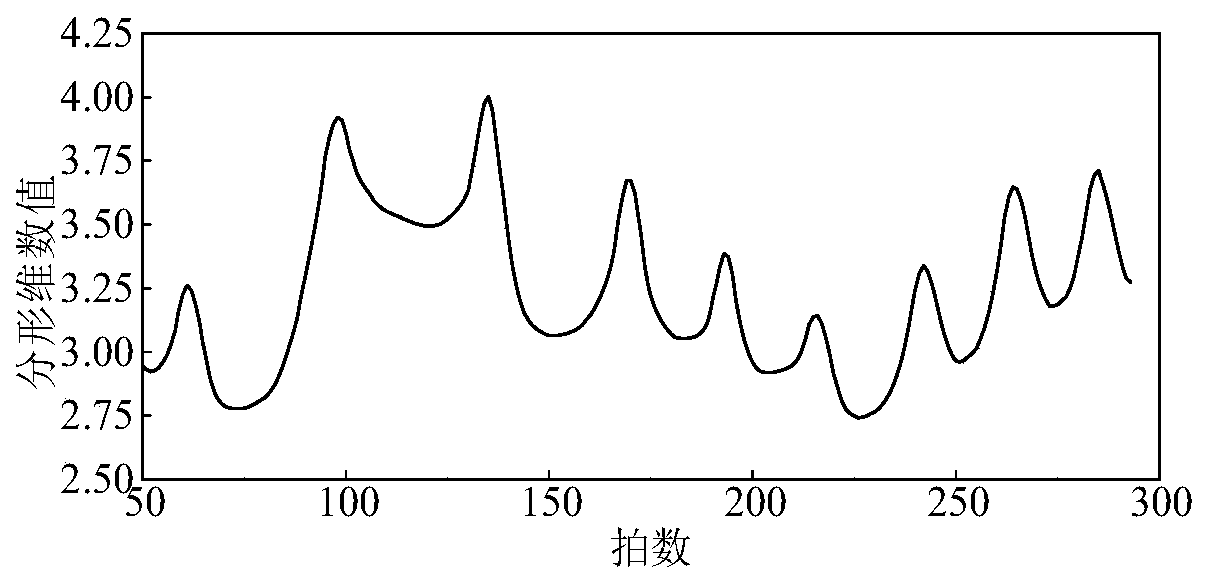
[0033] The traditional fractal dimension fault feature extraction method is to take multiple sets of data before and after the fault, and calculate the fractal dimension of the finite set of data as the fault feature. And judge the fault or perform other follow-up operations according to the difference of the fractal dimension before and after the faul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More