

Asymmetric quartic curve flexible acceleration and deceleration planning method
A quartic curve, asymmetric technology, used in program control, instrument, electrical program control, etc., can solve problems such as jerk step, achieve good smoothness, improve motion stability, and calculate stable and reliable effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
[0026] 1. Construction of asymmetric quartic curve flexible acceleration and deceleration planning model
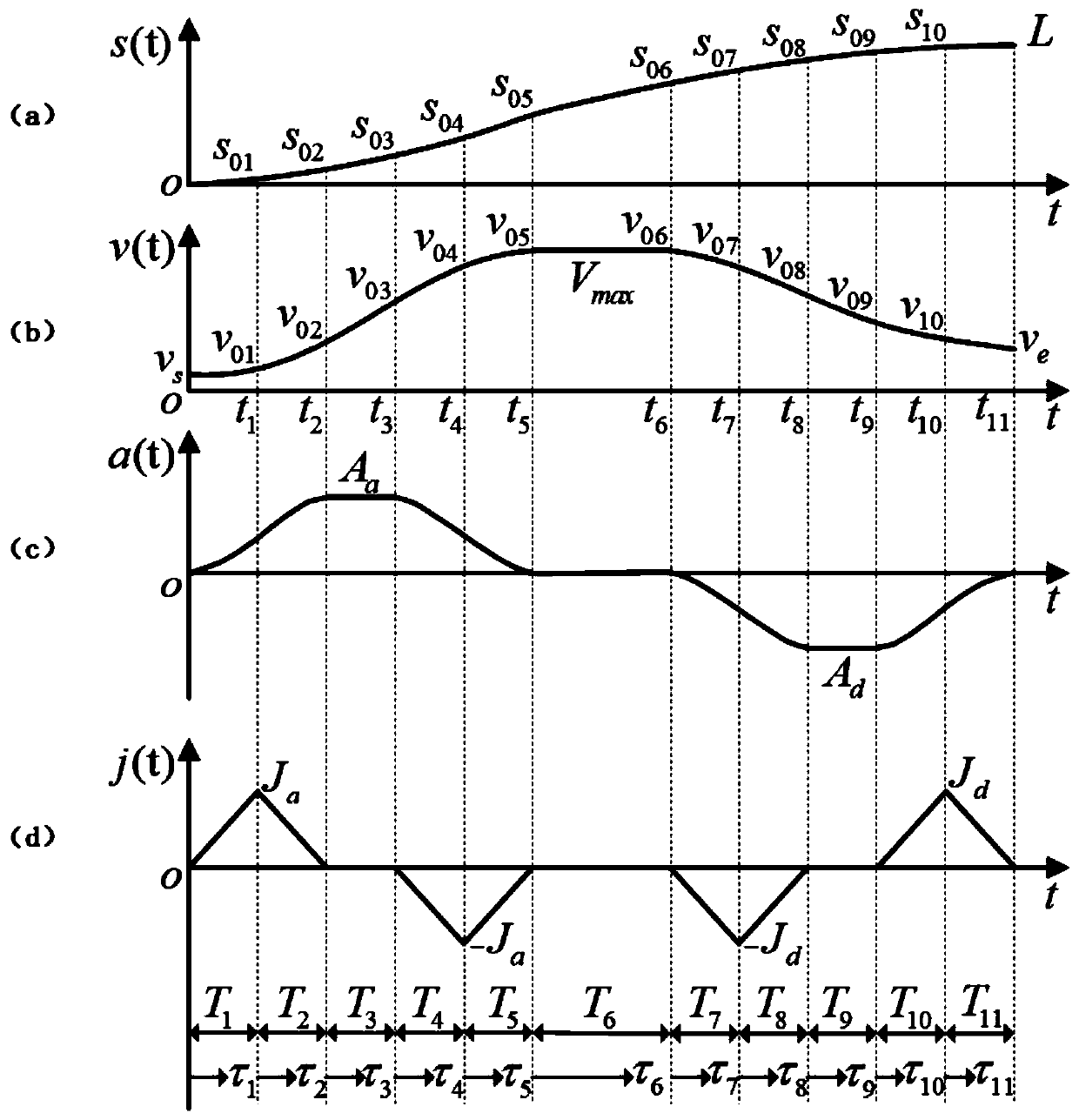
[0027] The acceleration and deceleration planning model constructed includes the acceleration motion stage, the uniform motion stage and the deceleration motion stage; the change law of the jerk is a triangular shape continuous change, and the acceleration, velocity and displacement change law are obtained by successive integration upwards, and the planned jerk, acceleration, Velocity and displacement are linear, quadratic, cubic, and quartic curves that vary continuously, respectively; parameter values can be different in both the acceleration phase and the deceleration phase.
[0028] The trajectory of acceleration and deceleration planning (the trajectory refers to the displacement, speed, acceleration or jerk of the tool during pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More