

Bolt centering control method for power transmission line bolt fastening robot
A technology of transmission lines and control methods, applied in the field of robots, can solve the problems of high error, lack of automatic bolt alignment ability, etc., and achieve the effect of high safety, stability and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The technical solutions of the embodiments of the present invention will be explained and described below in conjunction with the accompanying drawings of the embodiments of the present invention, but the following embodiments are only preferred embodiments of the present invention, not all of them. Based on the examples in the implementation manners, other examples obtained by those skilled in the art without making creative efforts all belong to the protection scope of the present invention.
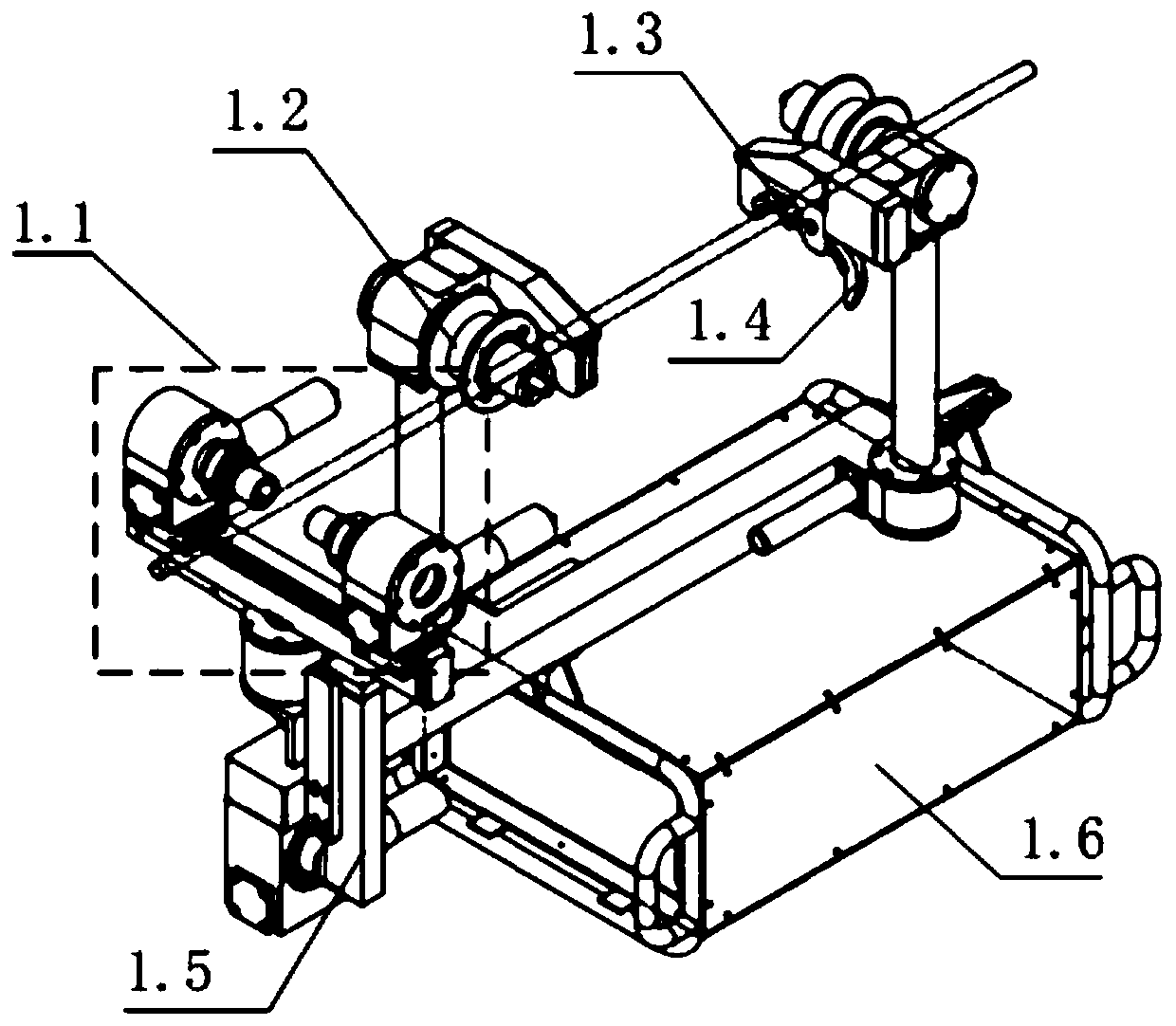
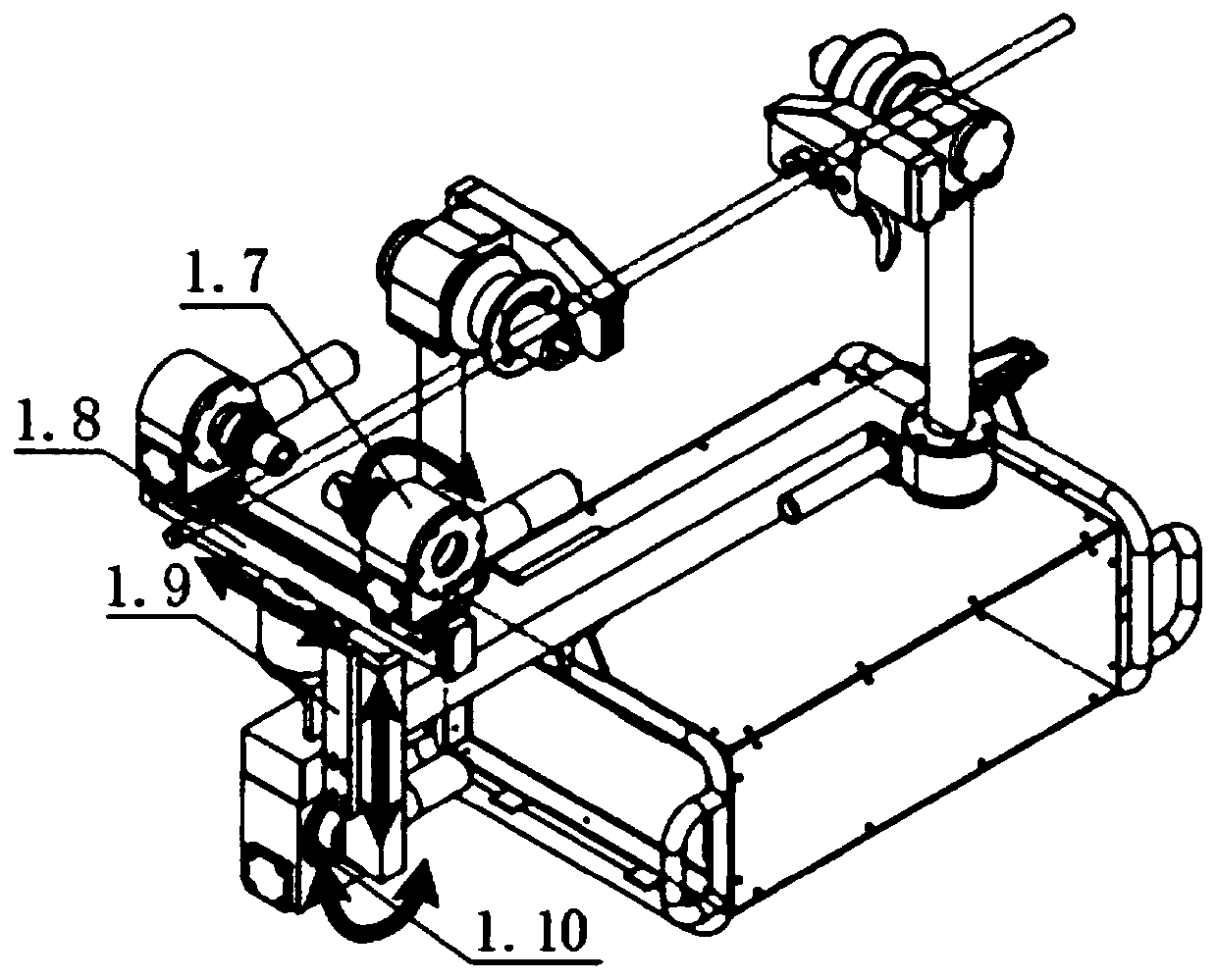
[0054] As shown in Figure 1 (a, b): a transmission line bolt fastening operation robot, its overall structure consists of a flexible end fastening device 1.1, a walking wheel 1.2, an equipotential wheel 1.3, a gripper 1.4, a mechanical arm 1.5 and a box Body 1.6 and so on. Among them, the multi-degree-of-freedom manipulator is composed of a rotary joint 1.7, a longitudinal joint 1.8, a telescopic joint 1.9, and a rotary joint 1.10. The specific action direction is shown in Figur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More