

Input Saturated Path-Following Control Method for Autonomous Vehicles
A path tracking and automatic driving technology, applied in the field of vehicle tracking control with input saturation, can solve the problems of reducing controller performance, closed-loop system instability, etc., and achieve the effect of improving path tracking performance, improving operation stability, and simple calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
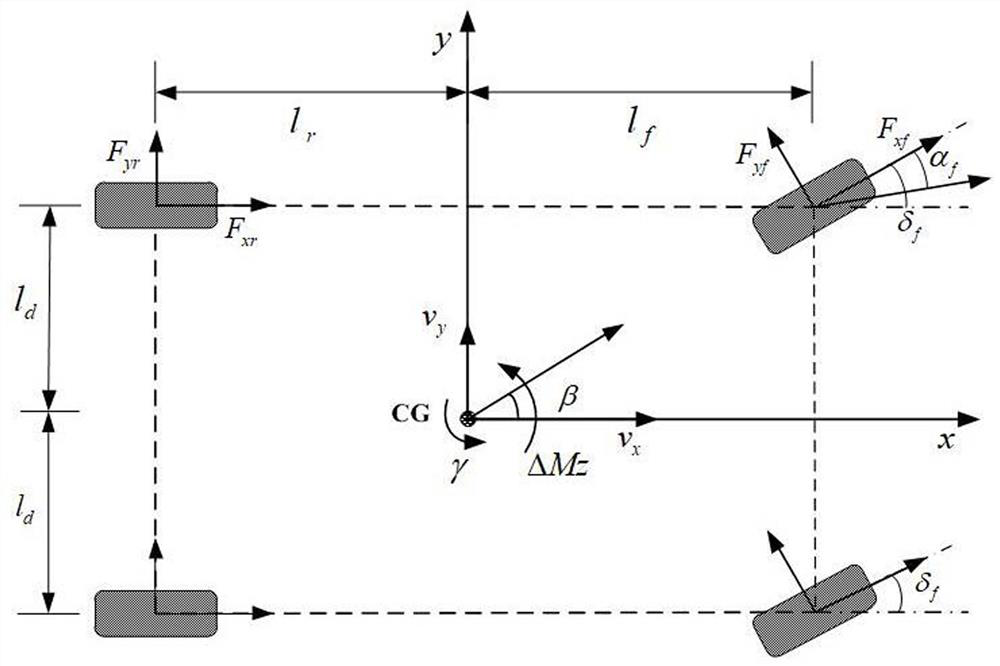
[0136] Preferably, in step a) by formula F yf = 2C f alpha f ,F yr =-2C r alpha r Calculate the lateral force F of the front tire of the vehicle yf and the lateral force F of the rear tire of the vehicle yr , where C f is the cornering stiffness of the front wheel, C r is the cornering stiffness of the rear wheel, α f is the side slip angle of the front wheel, α r is the slip angle of the rear wheel, where
Embodiment 2
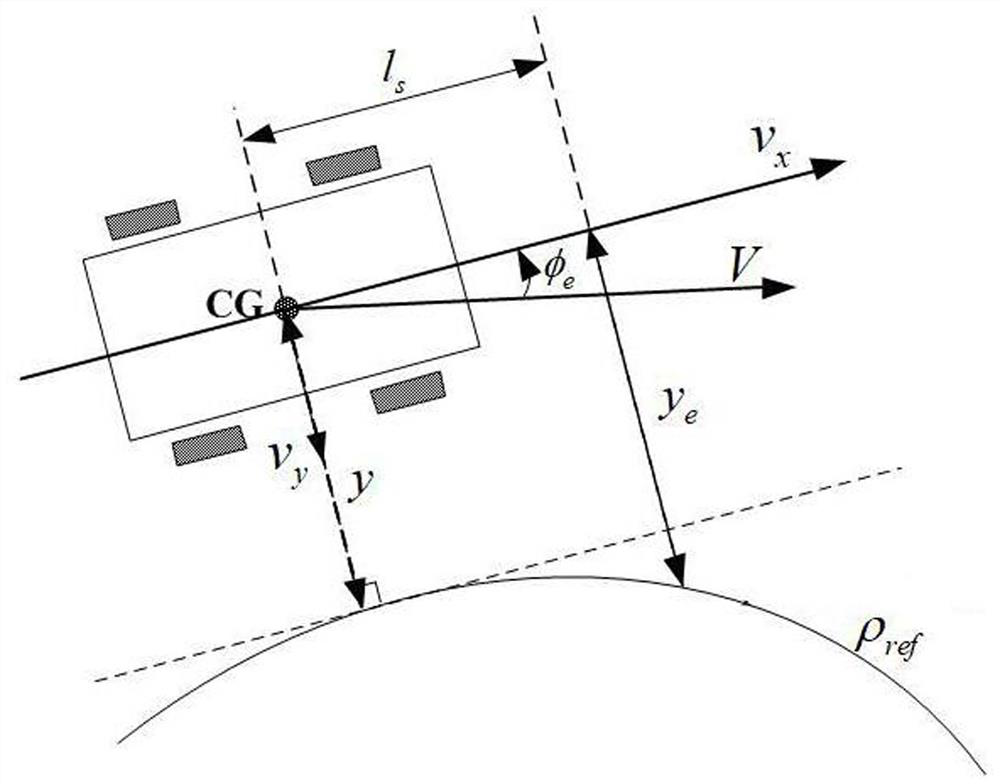
[0138] Curvature ρ in step b) ref Obtained through a combined GPS and GIS system.
Embodiment 3
[0140] In order to solve the problem of network delay and input saturation in path following control of autonomous vehicles, a robust H ∞ State feedback controller and static output feedback controller, so that the closed-loop system is asymptotically stable when d(t)=0, satisfying the given H ∞ Disturbance suppression performance index, and the control gain matrix can be obtained by solving the corresponding linear matrix inequality, which is easy to calculate. Therefore after step g), the following steps are performed:
[0141] h2) due to the vehicle lateral velocity v y It is difficult to obtain through low-cost sensor measurement, so in order to reduce the cost of the control system, we choose the output vector y=C 2 x=[γ,φ e ,y e ] T , a static output feedback path tracking controller is designed to solve the positive definite matrix X satisfying the linear matrix inequality as shown in formula (16). N >0,X G >0, general matrix i=1,2,3, and number ∈>0;
[0142...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More