

Unmanned vehicle cooperative driving capability test system and test method
A capability test, unmanned vehicle technology, applied in vehicle testing, machine/structural component testing, measuring devices, etc., can solve problems such as complex test methods, high test efficiency, and difficult to reproduce the scene, and achieve true test results Reliable, authoritative and reliable test results, and safe testing process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
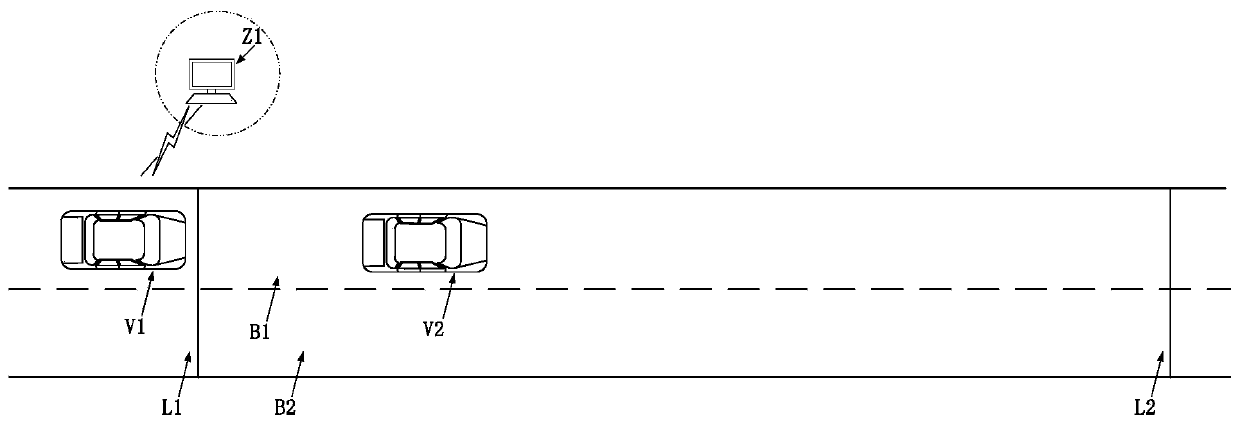
[0047] Such as figure 1 As shown, an unmanned vehicle cooperative driving ability test method is used to test the unmanned vehicle's cooperative following driving ability on a long straight road. The test road is a long straight road B1 and B2 containing at least two lanes, and the middle lane line It is the white dotted line, the unmanned vehicle to be tested V1, the target vehicle V2, the control center Z1, the test start point L1, and the test end point L2; including the following steps:
[0048] Step 1. The safety officer drives the unmanned vehicle V1 to be tested to the test starting point L1 of the test lane B1 in the manual driving mode, and stops the unmanned vehicle V1 to be tested. The control center Z1 presets the following distance to be 10 meters.
[0049] Step 2: The control center Z1 controls the target vehicle V2 to drive to a safe distance of 50 meters in front of the same lane of the unmanned vehicle V1 under test.
[0050] Step 3. The safety officer sends a test r...
Embodiment 2
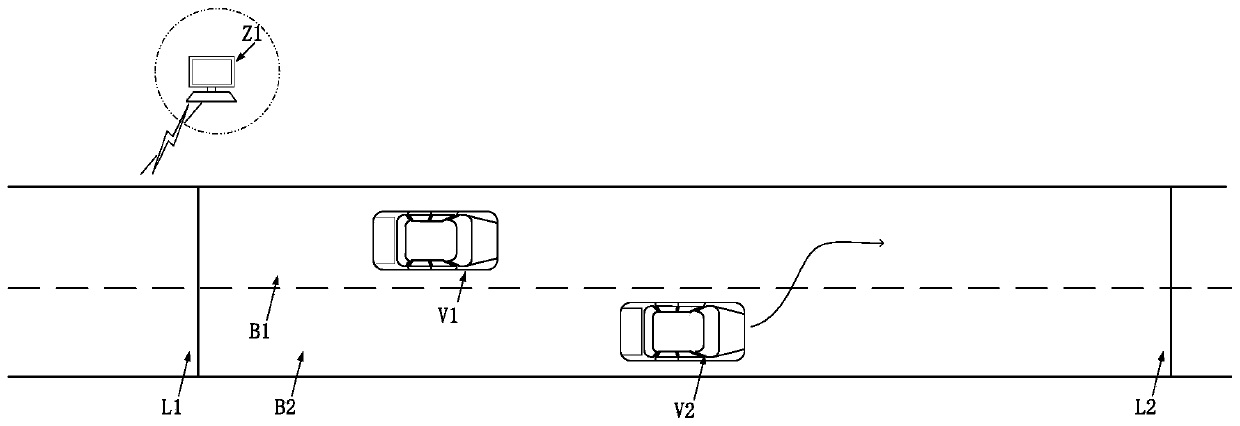
[0063] Such as figure 2 As shown, an unmanned vehicle cooperative driving ability test method is used to test the ability of the vehicle to cut in the adjacent lane on a long straight road, and the ability of the unmanned vehicle to slow down and avoid collisions. The test road is a long straight road containing at least two lanes B1 and B2, the middle lane line is the white dotted line, the unmanned vehicle to be tested V1, the target vehicle V2, the control center Z1, the test starting point L1, and the test end point L2; including the following steps:
[0064] Step 1. The safety officer drives the unmanned vehicle V1 to be tested to the test starting point L1 of lane B1 in the manual driving mode, and stops the unmanned vehicle V1 to be tested. The control center Z1 presets the following distance to be 10 meters.
[0065] Step 2: The control center Z1 controls the target vehicle V2 to drive to a safe distance of 50 meters in front of the adjacent lane of the unmanned vehicle V1 ...
Embodiment 3
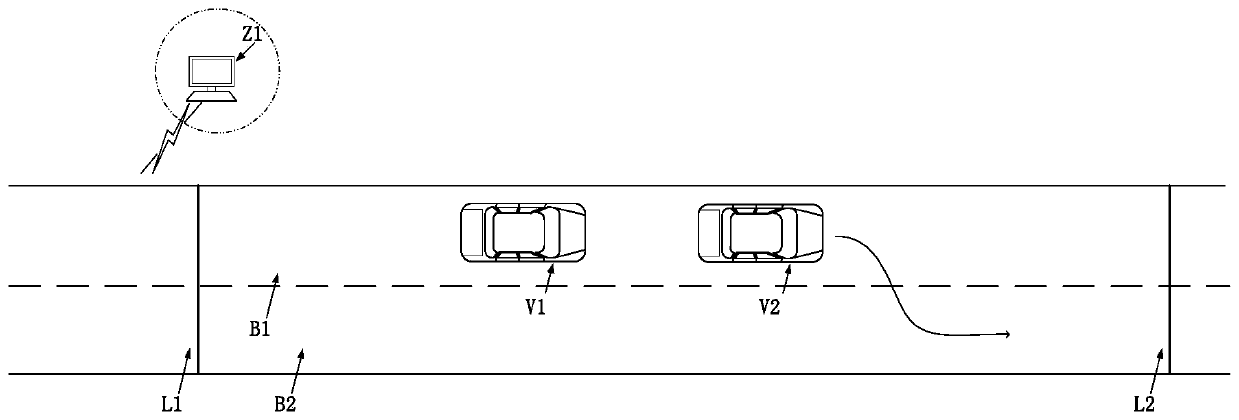
[0075] Such as image 3 As shown, an unmanned vehicle cooperative driving capability test method is used to test the ability of the unmanned vehicle to recognize and drive stably when the vehicle in front of the same lane is cut out on a long straight road. The test road is a long straight road containing at least two lanes. B1 and B2, the middle lane line is a white dashed line, the unmanned vehicle to be tested V1, the target vehicle V2, the control center Z1, the test starting point L1, the test end point L2; including the following steps:
[0076] Step 1. The safety officer drives the unmanned vehicle V1 to be tested to the test starting point L1 of lane B1 in the manual driving mode, and stops the unmanned vehicle V1 to be tested. The control center Z1 presets the following distance to be 10 meters.
[0077] Step 2: The control center Z1 controls the target vehicle V2 to drive to a safe distance of 50 meters in front of the same lane of the unmanned vehicle V1 under test.
[007...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More