

A main control unit and modular robot based on modular robot
A main control unit and robot technology, applied in the input/output of user/computer interaction, instruments, manipulators, etc., can solve the problem of single function of the main control unit, achieve the goal of improving intelligence, avoiding indirect interaction, and improving user experience Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and implementation examples. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention.
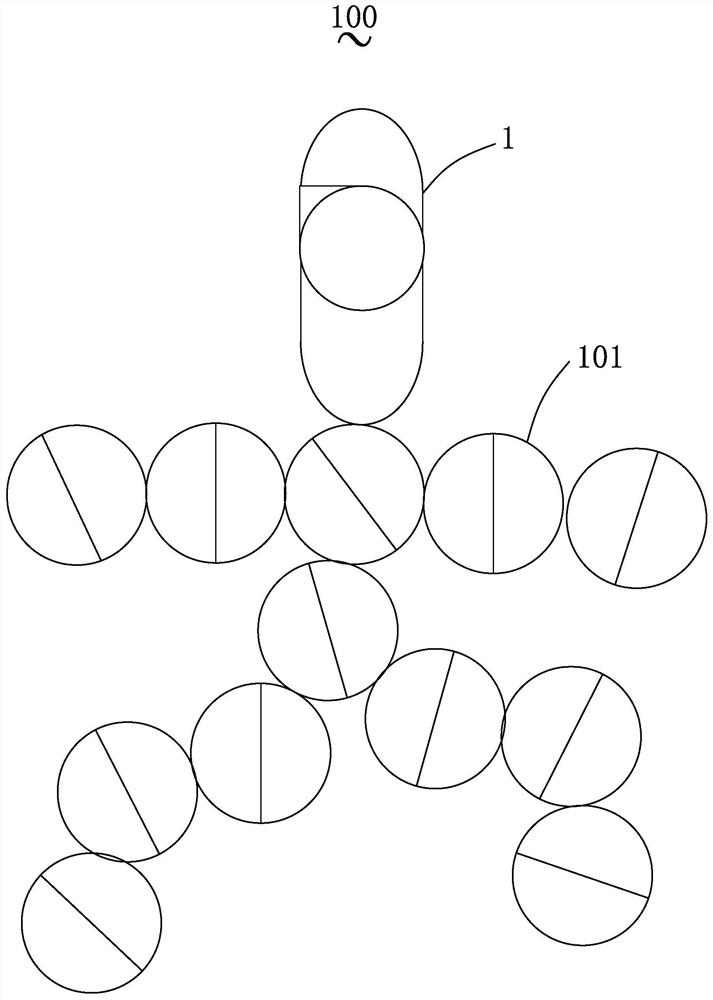
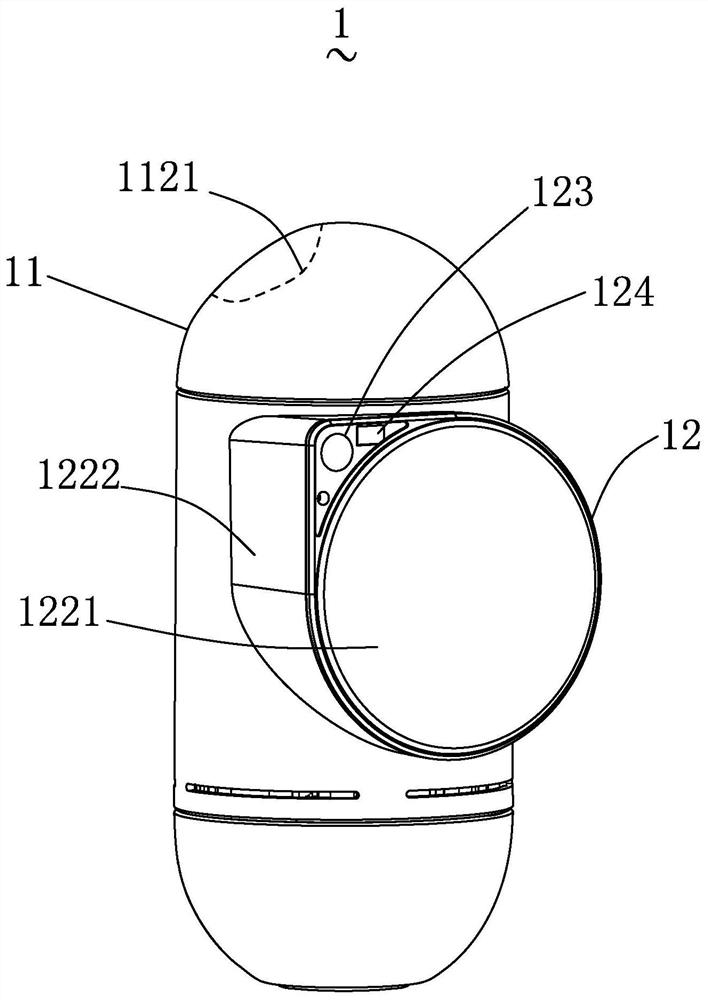
[0039] please combine figure 1 and figure 2The first embodiment of the present invention provides a main control unit 1 based on a modular robot. The modular robot 100 includes a plurality of constituent units 101 and at least one of the main control units 1. Detachable connection can be realized and can be combined and spliced arbitrarily according to user requirements, the main control unit 1 is connected with any one of the component units 101 to control the plurality of component units 101 and realize the automatic control of the modular robot 100 .
[0040] It can be ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More