

Method for optimizing robot control system based on NSGA-II fuzzy logic inference
A technology of control system and optimization method, applied in the direction of comprehensive factory control, program control manipulator, manipulator, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
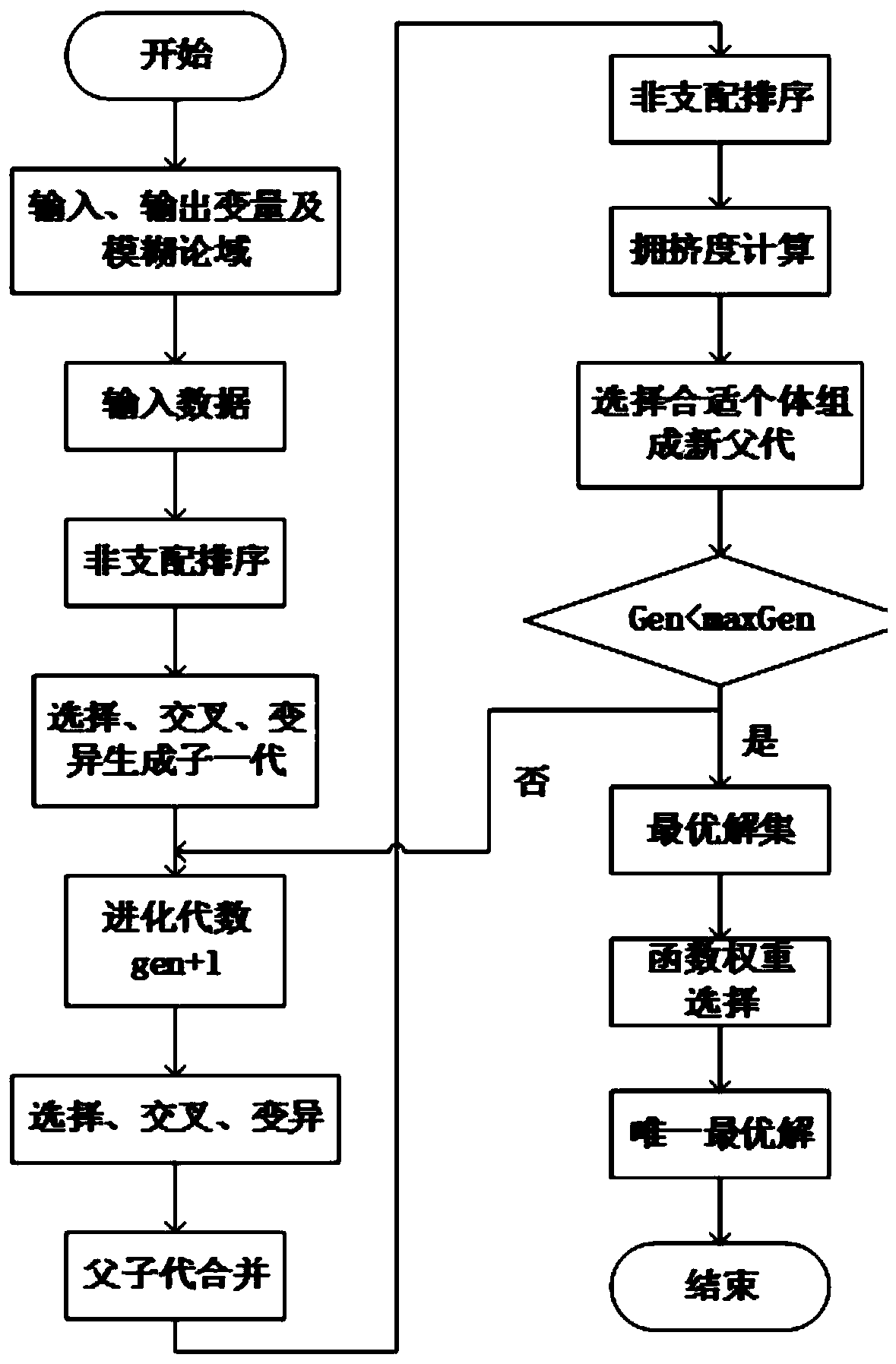
[0052] Such as figure 1 As shown, a robot control system optimization method based on NSGA-II fuzzy logic inference, including the following steps:
[0053] S1. Analyze the control system of the mobile robot to determine the input and output quantities and fuzzy subsets:
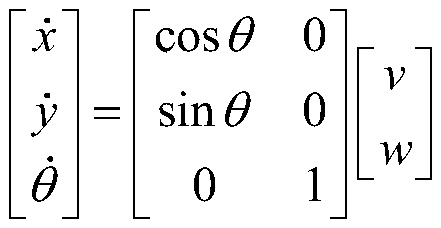
[0054] The general mobile robot kinematics equation is:
[0055]
[0056] Among them, x, y, and θ are robot poses, v, w are linear velocity and angular velocity. v ref 、w ref For the ideal input, set the position command as (x m ,y m ,θm ), y=[x y θ] T For the actual output, the pose error function is defined as e(x,y,θ), the error rate of change function is ec(x,y,θ), and the control variable u=[v ref w ref ] T ;
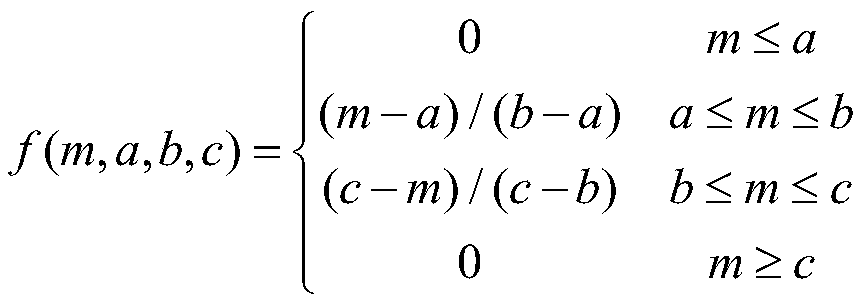
[0057] According to the domain of input a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More