

Lithium ion battery remaining capacity and sensor deviation cooperative estimation method based on neural network and unscented Kalman filter
A lithium-ion battery and untraceable Kalman technology, which is applied in the direction of measuring electrical variables, instruments, and measuring electricity, can solve the problems that cannot be estimated online, lithium-ion batteries are not applicable, and it takes several to ten hours to achieve The effect of small error, high precision and fast convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] A method for cooperatively estimating the residual power of a lithium electronic battery and sensor bias based on a neural network and an unscented Kalman filter, comprising the following steps:
[0058] S1: Conduct lithium-ion battery charging and discharging experiments and collect sample data, including training data and test data;
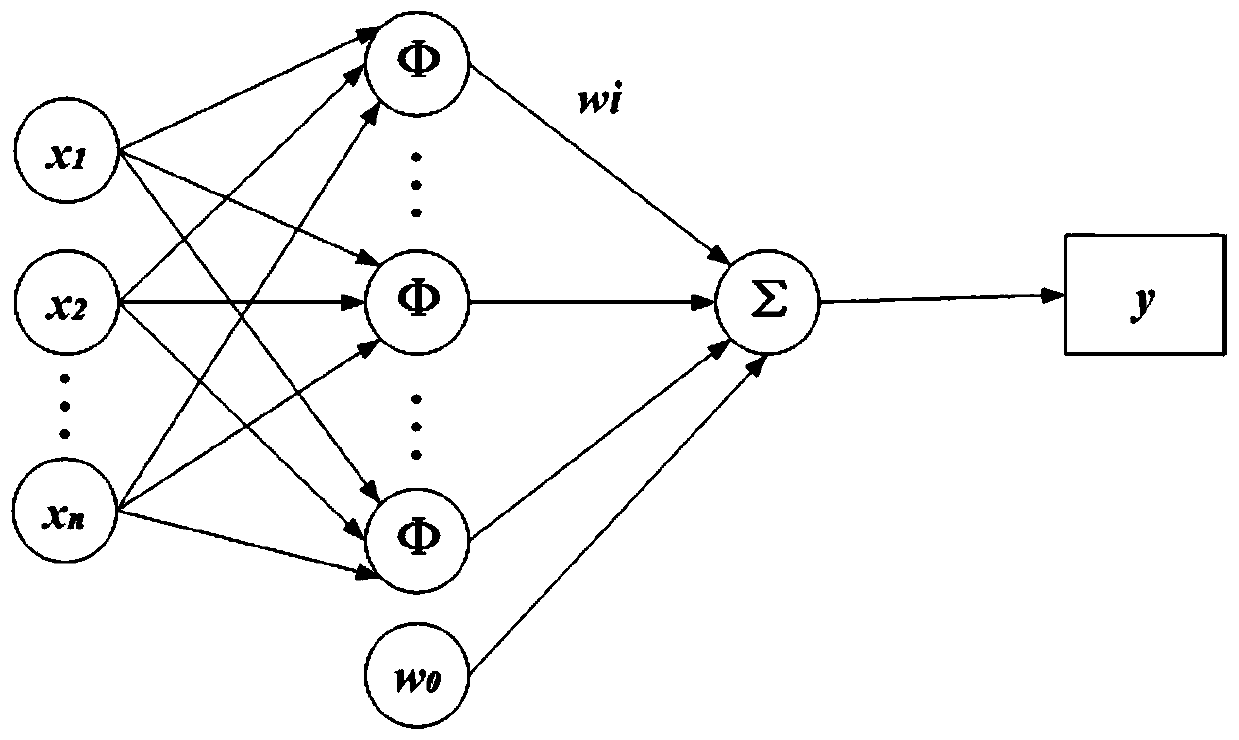
[0059] S2: Determine the input and output variables of the neural network, and establish the RBFNN model of the SOC;
[0060] S3: Perform parameter learning on the established RBFNN based on the training data set to obtain an accurate RBFNN model;
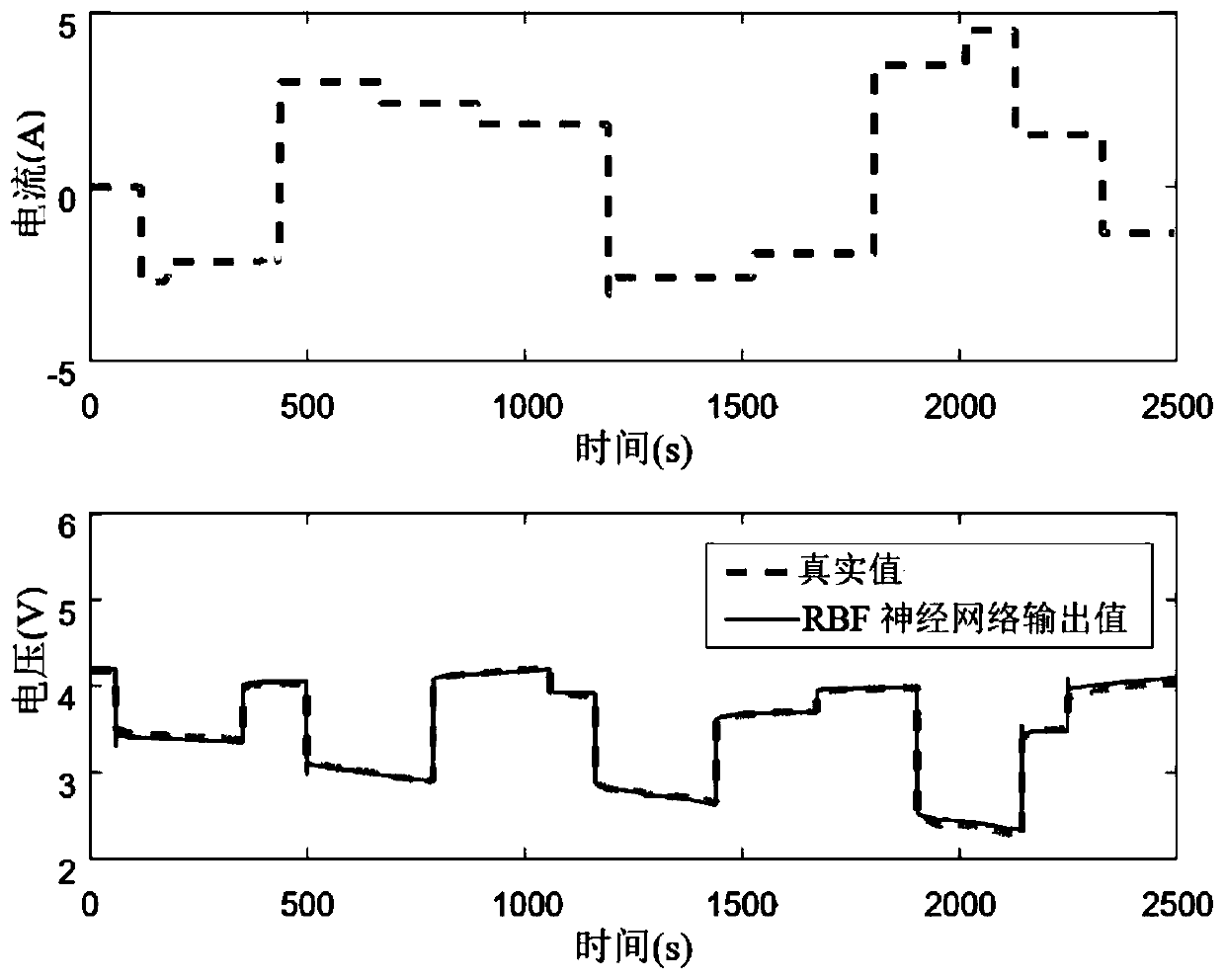
[0061] S4: Use the test data to perform an independent accuracy test on the established RBFNN;
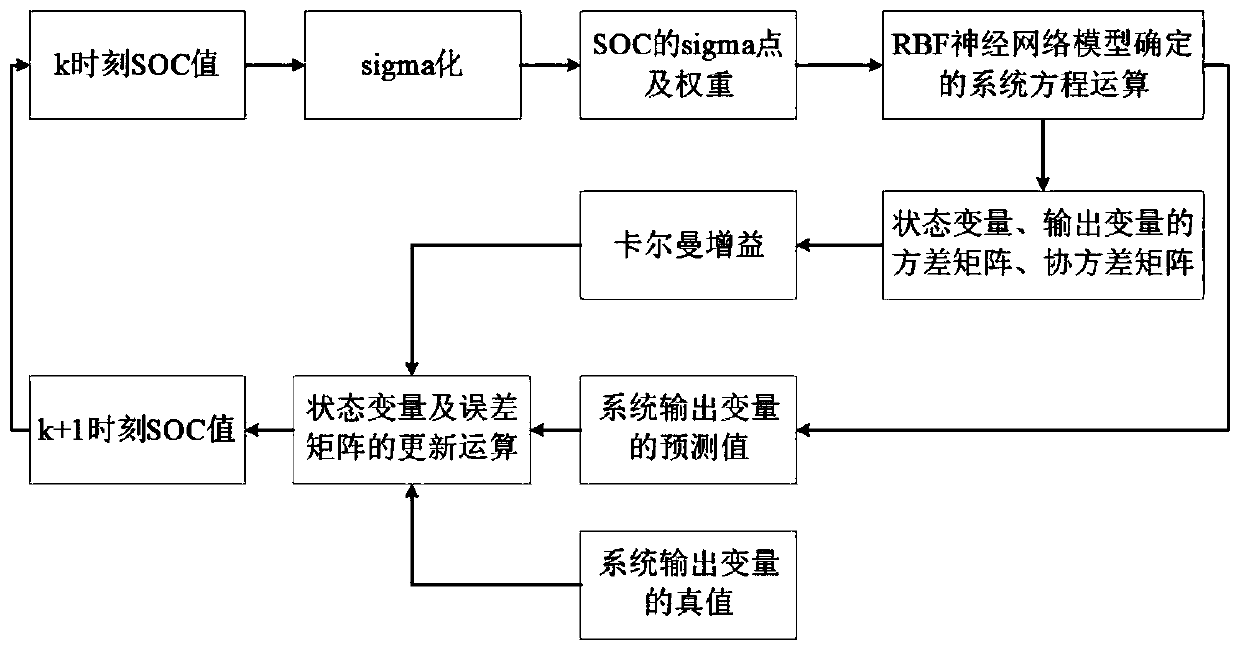
[0062] S5: Set the SOC as an internal state, and design RBFNN-UKF to realize real-time estimation of SOC when the initial SOC is uncertain;
[0063] S6: Set the sensor bias to the expanded state, and design the expanded RBFNN-UKF on the basis of the original RBFNN-UKF to realize the collaborativ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More