

High-precision direction arrow extraction method and system based on point cloud
A high-precision, arrow technology, which is applied in image data processing, instruments, character and pattern recognition, etc., can solve the problem of low extraction efficiency of direction arrows, achieve the effect of saving time and economic cost, high precision, and improving extraction efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
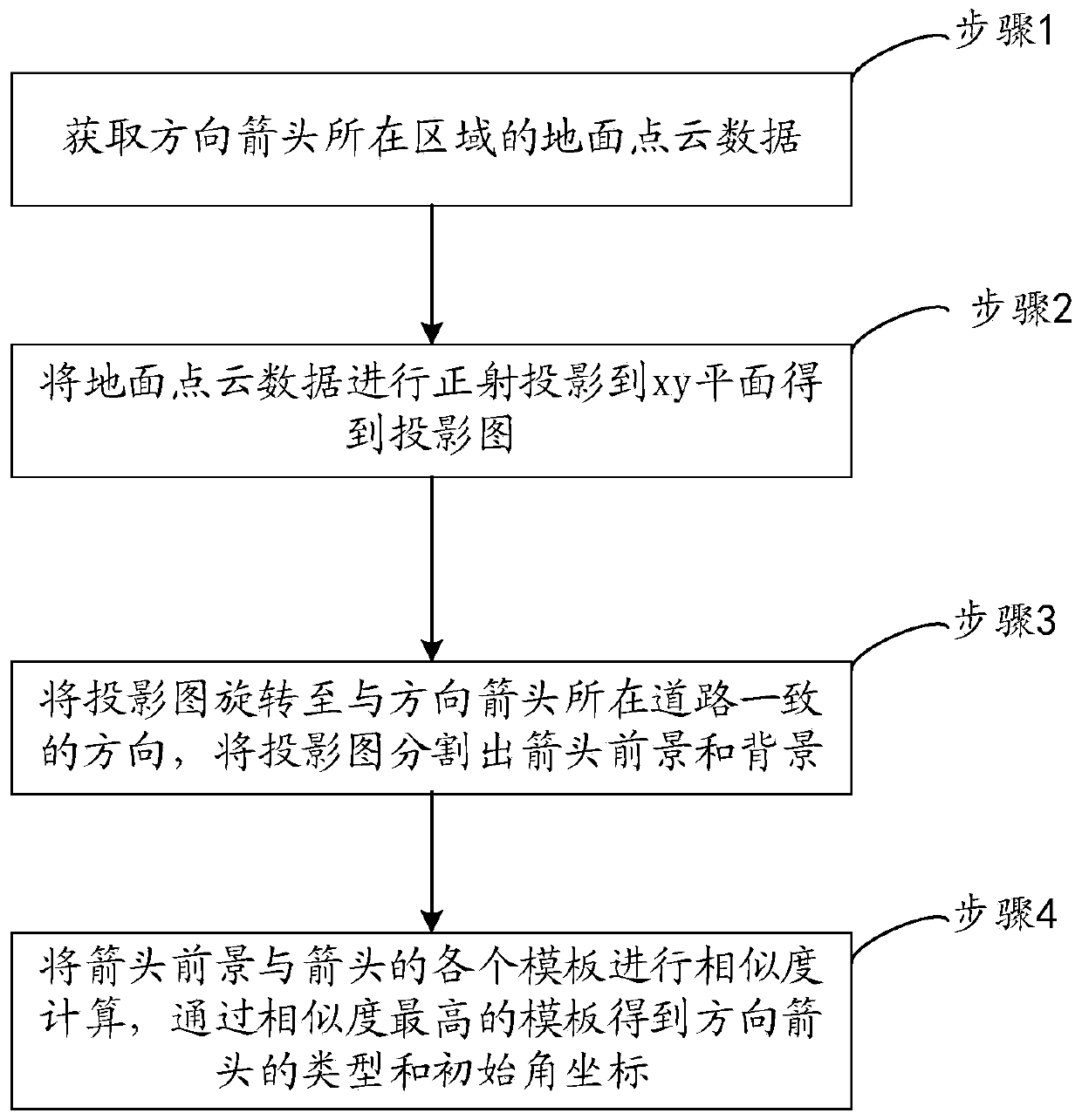
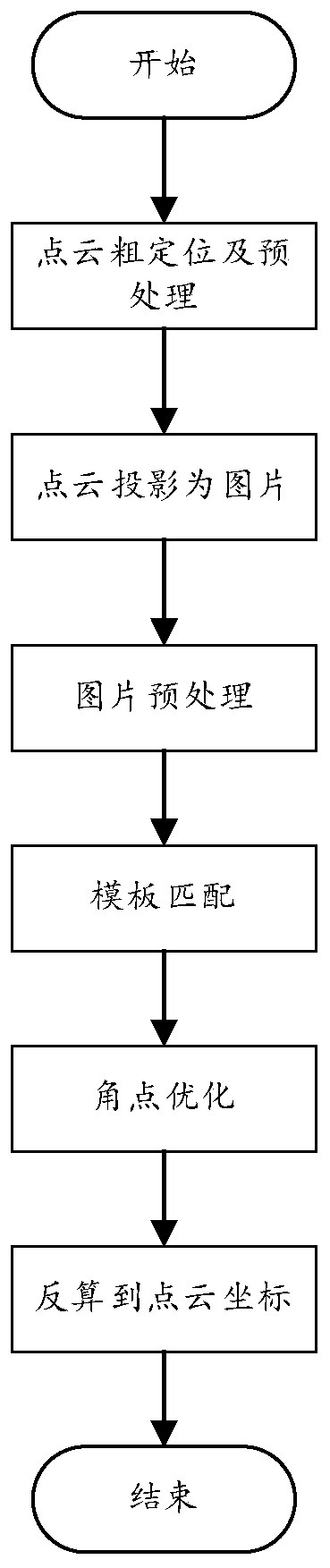
[0046] Embodiment 1 provided by the present invention is an embodiment of a method for extracting high-precision direction arrows based on point clouds provided by the present invention, such as figure 2 Shown is a flow chart of an embodiment of a point cloud-based high-precision direction arrow extraction method provided by the present invention. Depend on figure 2 It can be seen that the method includes:
[0047] Step 1. Obtain the ground point cloud data of the area where the direction arrow is located.
[0048] The positioning point of the direction arrow is determined by manual selection or calculation of road video or picture data, and the location is determined according to the positioning point and the size of the area, and the size of the area is set according to the actual situation of the road.
[0049] In step 1, perform rough positioning on the position of the direction arrow. You only need to ensure that the ground point cloud data completely contains the dir...
Embodiment 2
[0071] Embodiment 2 provided by the present invention is an embodiment of a point cloud-based high-precision direction arrow extraction system provided by the present invention, such as Figure 6 Shown is a structural block diagram of an embodiment of an environmental event monitoring system of the environmental Internet of Things provided by the present invention, consisting of Figure 6 It can be seen that the system includes: a point cloud data acquisition module 101 , a projection map determination module 102 , an arrow foreground determination module 103 and a direction arrow determination module 104 .
[0072] The point cloud data acquisition module 101 acquires the ground point cloud data of the area where the direction arrow is located.
[0073] The projection map determination module 102 performs orthographic projection of the ground point cloud data onto the xy plane to obtain a projection map.
[0074] The arrow foreground determining module 103 is configured to ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More