Vehicle control method, device and equipment, vehicle and medium
A vehicle control and vehicle driving technology, which is applied in the field of intelligent transportation, can solve problems such as untimely acceleration and deceleration, vehicle jerky driving, and impact on vehicle driving safety, so as to achieve the effect of dynamic control, driving safety, and service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
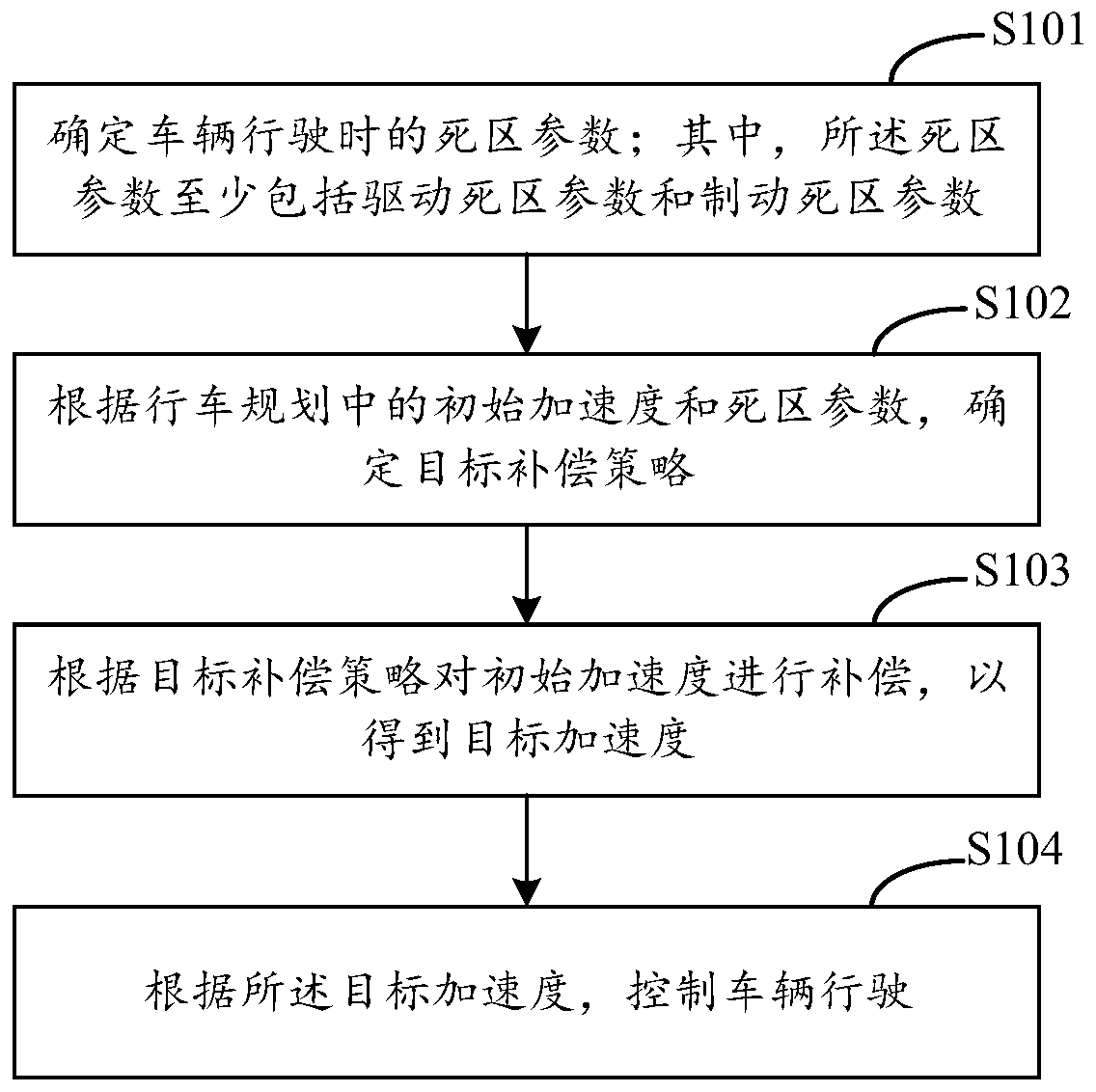
[0058] figure 1 It is a flowchart of a vehicle control method in an embodiment of the present application. The embodiments of the present application are suitable for situations in which the driving process of the vehicle is controlled during the driving process of a vehicle, especially an unmanned vehicle. The method is executed by a vehicle control device, which is implemented by software and / or hardware, and is specifically configured in an electronic device, which can be integrated in a vehicle control system.
[0059] Such as figure 1 A vehicle control method shown includes:
[0060] S101. Determine a dead zone parameter when the vehicle is running; wherein the dead zone parameter includes at least a driving dead zone parameter and a braking dead zone parameter.
[0061] Among them, the deadband is also called the neutral zone or the inactive zone, which refers to the range of the input signal or the input signal related signal whose output is zero in the control system.
[0062...
Embodiment 2
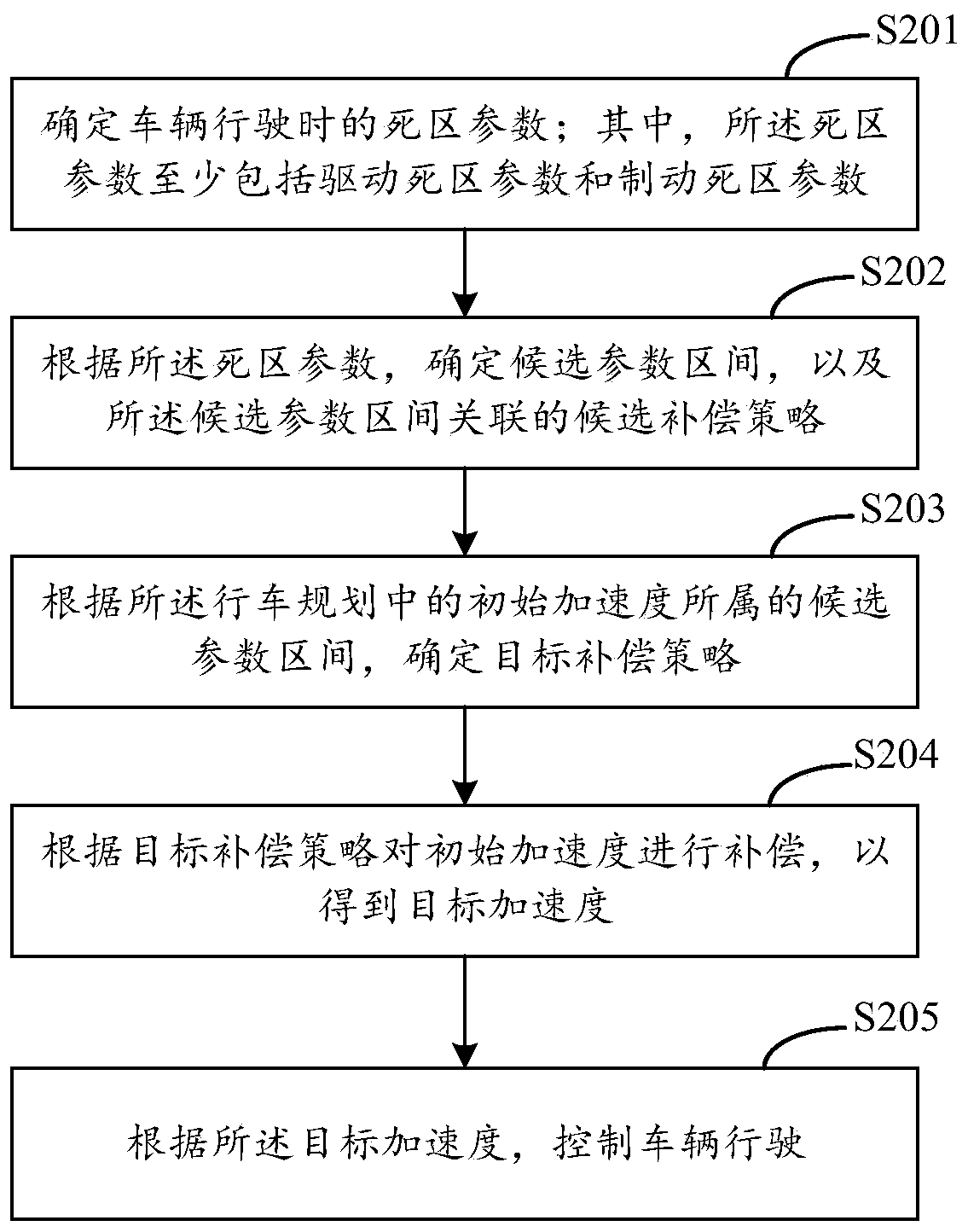
[0080] figure 2 It is a flow chart of a vehicle control method in the second embodiment of the present application. The embodiments of the present application are optimized and improved on the basis of the technical solutions of the foregoing embodiments.
[0081] Further, the operation "determine the target compensation strategy based on the initial acceleration in the driving plan and the dead zone parameter" is refined into "determine the candidate parameter interval according to the dead zone parameter, and the associated parameter interval of the candidate parameter. Candidate compensation strategy; according to the candidate parameter interval to which the initial acceleration in the driving plan belongs, determine the target compensation strategy" to improve the target compensation strategy determination mechanism.
[0082] Such as figure 2 A vehicle control method shown includes:
[0083] S201: Determine a dead zone parameter when the vehicle is running; wherein the dead zo...
Embodiment 3
[0111] Figure 4 It is a structural diagram of a vehicle control device in the third embodiment of the present application. The embodiment of the present application is suitable for controlling the driving process of the vehicle during the driving process of the vehicle, especially the unmanned vehicle. The device is implemented by software and / or hardware, and is specifically configured in an electronic device, which can be integrated in the control system of the vehicle.
[0112] Such as Figure 4 A vehicle control device 400 shown includes a dead zone parameter determination module 401, a target compensation strategy determination module 402, a target acceleration obtaining module 403, and a vehicle driving control module 404. among them,
[0113] The dead zone parameter determination module 401 is used to determine the dead zone parameters when the vehicle is driving; wherein, the dead zone parameters include at least driving dead zone parameters and braking dead zone parameter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More