

Automatic driving control method and control system of paver, and paver
A technology of automatic driving and control methods, applied in roads, road repairs, roads, etc., can solve problems such as high labor requirements and high labor intensity, and achieve the effects of easy control operations, lower requirements, and reduced labor costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
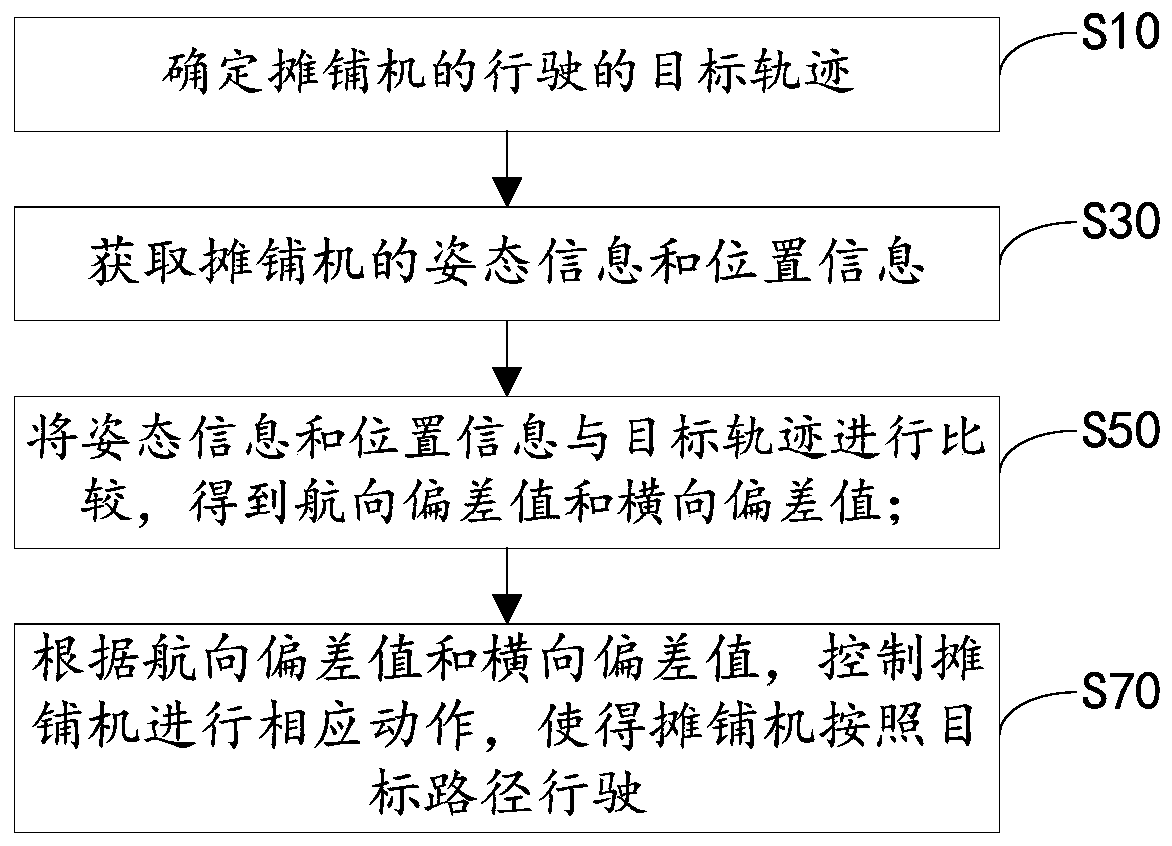
[0037] like figure 1 As shown, some embodiments of the present application provide an automatic driving control method of a paver, including: step S10, determining the target path of the paver; step S30, obtaining the attitude information and position information of the paver; Step S50, compare the attitude information and position information with the target path to obtain the course deviation value and lateral deviation value; Step S70, control the paver to perform corresponding actions according to the course deviation value and lateral deviation value, so that the paver follows the target path path travel.
[0038] The automatic driving control method provided in this embodiment, through the real-time tracking and positioning of the paver during the road construction process, and accordingly provides data support for the paver's forward, steering and other driving control commands to control the paver. The traveling mechanism of the paver performs corresponding actions, r...
Embodiment 2
[0049] Some embodiments of the present application provide an automatic driving control system 100 of a paver 200 , including a positioning and navigation device 10 , a controller 20 and a human-computer interaction device 30 .
[0050] like Figure 4 As shown, the controller 20 includes a memory 22, a processor 24, and an automatic driving program stored on the memory 22 and operable on the processor 24. When the automatic driving program is executed, the automatic driving control as in any of the above-mentioned embodiments is realized. method. The positioning and navigation device 10 is connected to the controller 20 for acquiring the attitude information and position information of the paver 200, and sending the attitude information and position information to the controller 20, and the human-computer interaction device 30 is connected to the controller 20 for The target path driven by the paver 200 is transmitted to the controller 20, so that the controller 20 can form a...
Embodiment 3
[0059] like Image 6 As shown, some embodiments of the present application provide a paver 200 including: a vehicle body 202 and an automatic driving control system 100 . Wherein, the car body 202 is provided with a traveling mechanism 204, and the traveling mechanism 204 includes a left crawler belt and a right crawler belt; The connection is used to send a control signal to the traveling mechanism 204 to drive the left crawler belt and the right crawler belt to act independently.
[0060] The controller 20 on the paver 200 compares the attitude information and position information provided by the positioning navigation device 10 with the target path imported by the touch screen 32, calculates the course deviation value and the lateral deviation value, and controls the paver by using the PID algorithm. The electric proportional valve of the left crawler of the paver 200 and the electric proportional valve of the right crawler change the speed difference between the left craw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More