

Active training control method and device for lower limb walking trainer
A technology of active training and walking training, applied in the direction of muscle training equipment, sensors, gymnastic equipment, etc., can solve the problems of lack of active training algorithms, evaluation of patients' rehabilitation degree, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
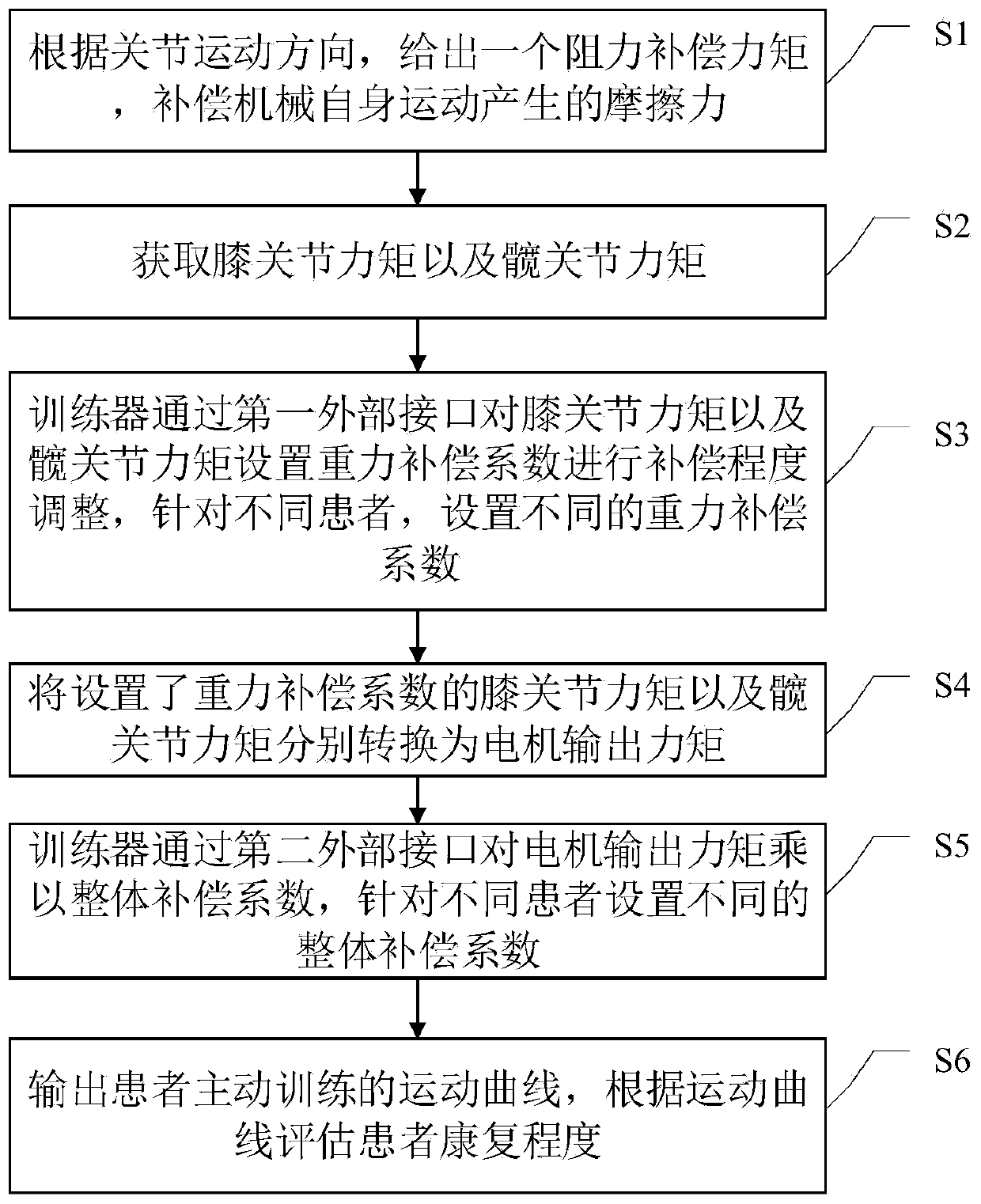
[0044] Such as figure 1 Shown, a kind of lower limbs walking trainer active training control method, described method comprises:
[0045] Step S1: According to the movement direction of the joint, a resistance compensation torque is given to compensate the friction force generated by the machine itself; during the movement of the joint, due to mechanical friction and other factors, resistance to the movement will be generated, and the magnitude of this resistance is usually constant , the direction is opposite to the direction of joint motion. Therefore, as long as the movement direction of the joint is monitored and a torque in the same direction as the joint movement is given in real time, the resistance during the movement can be offset and the friction force generated by the machine's own movement can be compensated. The compensation torque is related to the characteristics of the machine. Through Test and experimentation can be used to obtain a suitable compensating torq...
Embodiment 2
[0057] Corresponding to Embodiment 1 of the present invention, Embodiment 2 of the present invention also provides an active training control device for a lower limb walking trainer, the device comprising:
[0058] The resistance compensation module is used to provide a resistance compensation torque according to the direction of joint movement to compensate the friction force generated by the movement of the machine itself;
[0059] The joint torque acquisition module is used to acquire the knee joint torque and the hip joint torque;
[0060] The gravity compensation coefficient setting module is used for the trainer to adjust the compensation degree of the knee joint torque and the hip joint torque setting gravity compensation coefficient through the first external interface, and set different gravity compensation coefficients for different patients;
[0061] The motor output torque acquisition module is used to convert the knee joint torque and the hip joint torque with the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More