

System and method for controlling foot compliance and balance of a biped robot
A bipedal robot and balance control technology, applied in the direction of program control manipulators, manipulators, motor vehicles, etc., can solve the problems of controller failure, insufficient ground information, and insensitive response to robot attitude deviation, so as to achieve stronger balance control. , Solve the contradiction between the smooth effect and the balance effect, the effect of the best balance control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
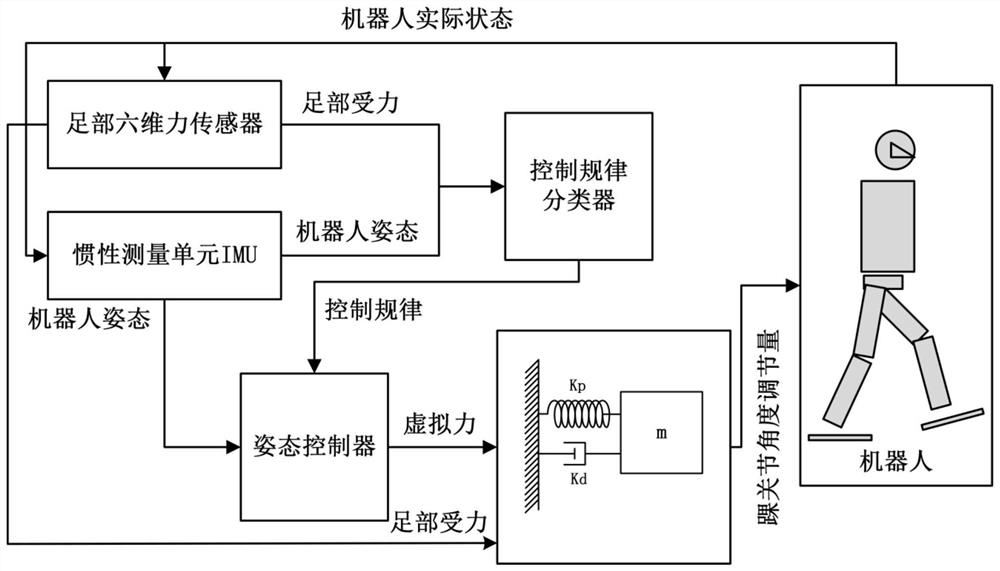
[0031] Such as figure 1 As shown, a biped robot foot compliance balance control system includes a six-dimensional force sensor, an inertial measurement unit IMU, a control law classifier, an attitude controller, and a compliance control model; the six-dimensional force sensor collects the foot The internal force is transmitted to the control law classifier; the inertial measurement unit IMU collects the attitude of the robot in the actual state and transmits it to the control law classifier; the attitude controller obtains the virtual force and virtual moment according to the control law and the real-time attitude of the robot, Input to the compliant control model, the compliant control model combines the real-time foot force of the robot to obtain the adjustment amount o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More