

Fixed-time consistency tracking method for high-order multi-agent systems based on directed topology
A multi-agent system, consistent technology, applied in general control systems, control/regulation systems, target-seeking control, etc. Scalability, cost reduction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0085] Example: Leader-follower consistency control when the flexible joint manipulator multi-agent system is fixed
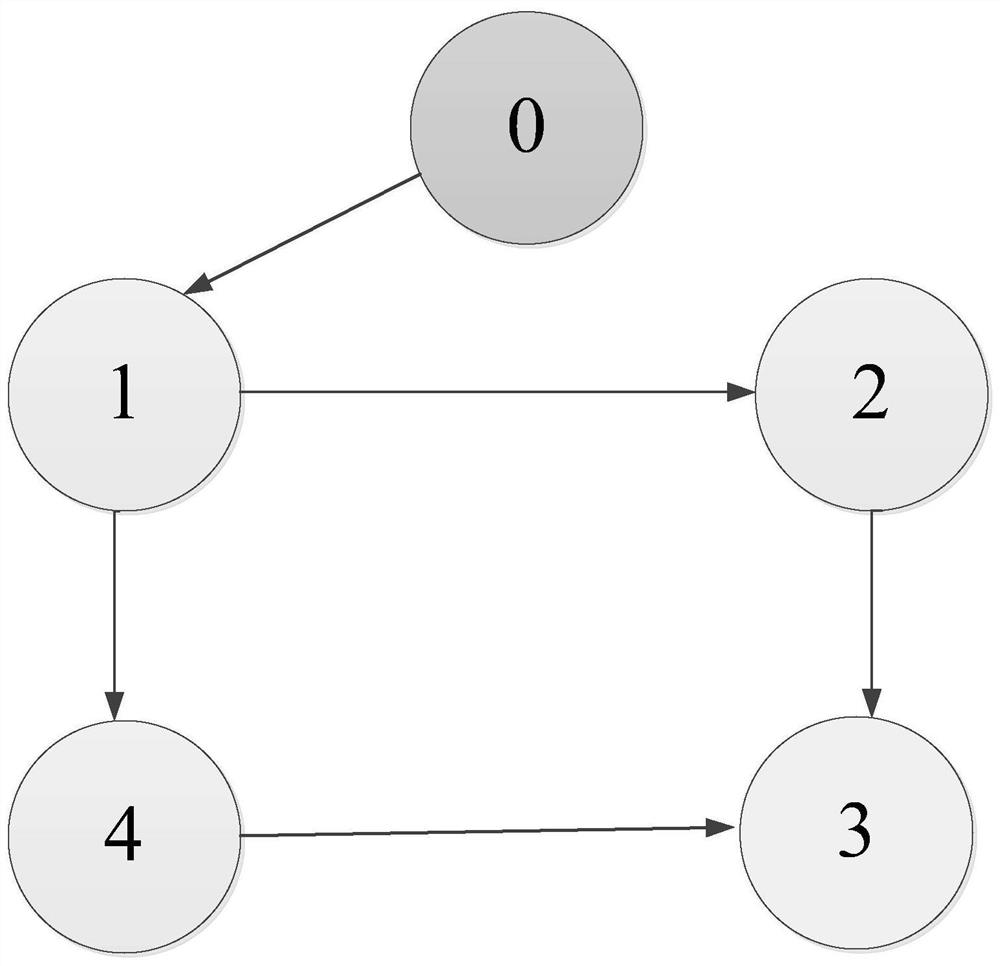
[0086] Flexible joint manipulators have been widely used in machining, space technology, welding and other fields. In order to make it faster and more precise to complete the command action, it is necessary to develop a fast and accurate coordinated control method for the flexible joint manipulator system. Taking the multi-agent system of flexible joint manipulator as an example, the effectiveness of the proposed leader-follower consensus scheme is demonstrated. The topology of a group of single-connected flexible joint manipulators is as follows: figure 2 As shown, the multi-agent system consists of 1 leader and 4 followers, by figure 2 It can be seen that information is transmitted in one direction. The dynamics of the single-link flexible joint manipulator are as follows:
[0087]
[0088] m i is the quality of the connection, L i is the distance ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More