

Cluster recovery path planning method, device and equipment and readable storage medium
A path planning and clustering technology, applied in the field of robotics, can solve problems such as mismatching of actual motion capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
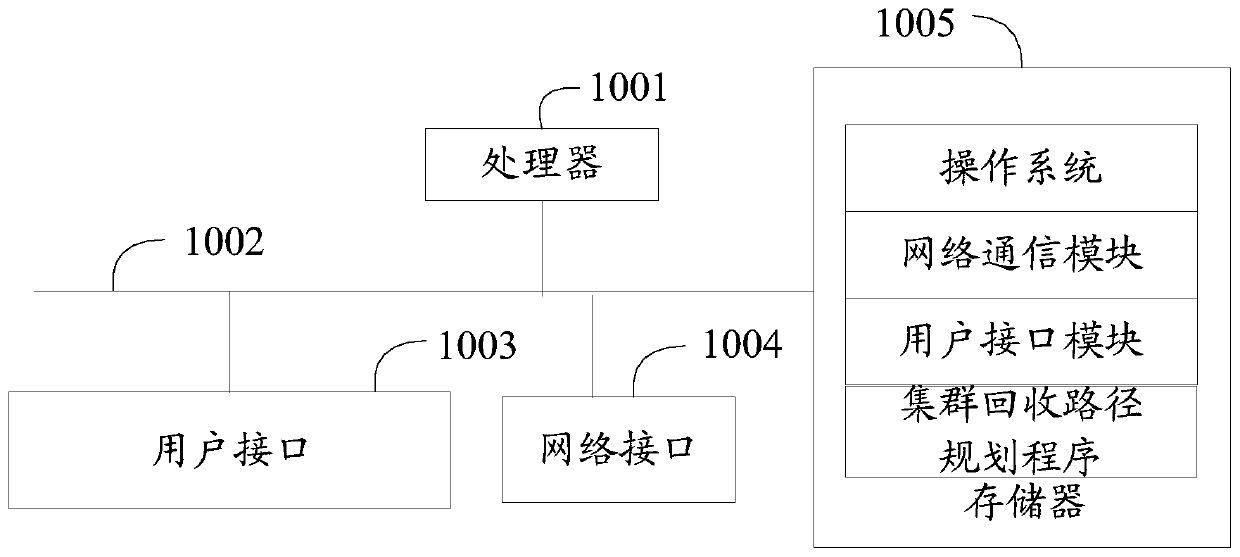
[0040] Such as figure 1 as shown, figure 1 It is a schematic diagram of the terminal structure of the hardware operating environment involved in the solution of the embodiment of the present invention.
[0041] The terminal in this embodiment of the present invention may be a PC, or may be a mobile terminal device with a display function such as a smart phone, a tablet computer, or the like.
[0042] Such as figure 1 As shown, the terminal may include: a processor 1001 , such as a CPU, a communication bus 1002 , a user interface 1003 , a network interface 1004 , and a memory 1005 . Wherein, the communication bus 1002 is used to realize connection and communication between these components. The user interface 1003 may include a display screen (Display), an input unit such as a keyboard (Keyboard), and the optional ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More