

One-to-many scheduling system for remotely controlling search and rescue robot based on ad hoc network
A scheduling system and ad hoc network technology, applied in machine-to-machine/machine-type communication services, transmission systems, network topology, etc., can solve the problems of complex search and rescue environment, slow deployment speed, and reduced scope of use, and achieve increased The effect of remote control range and strong system adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
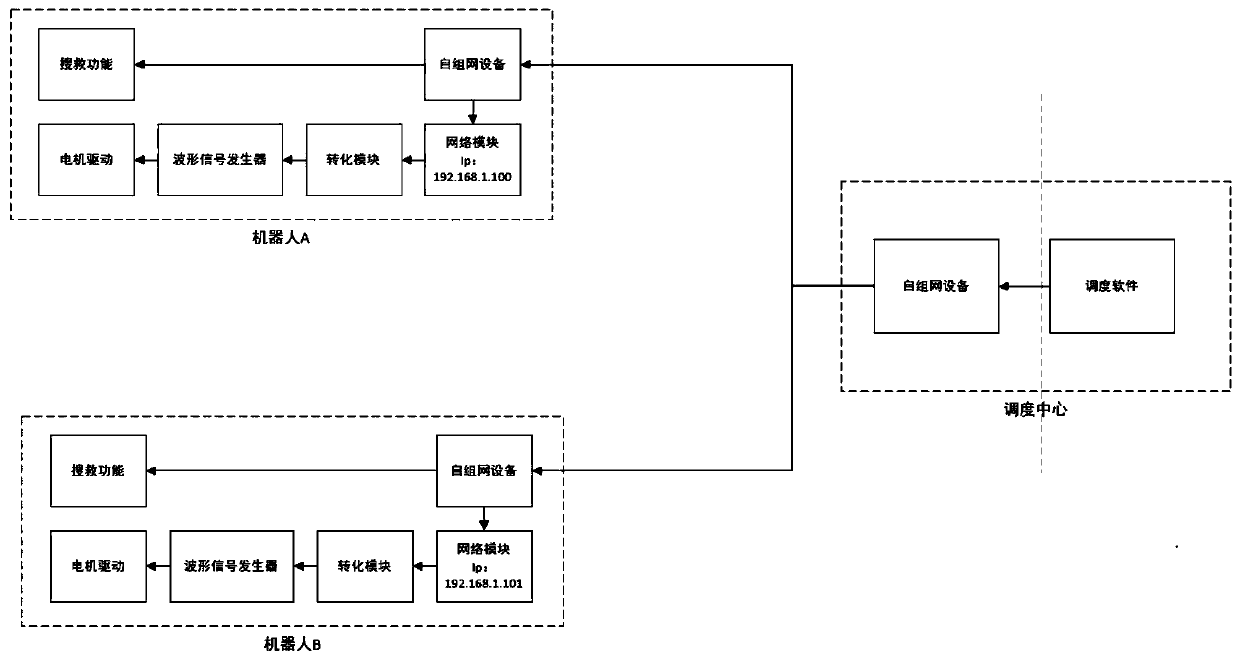
[0013] Such as figure 1 As shown, the one-to-many dispatching system for remote search and rescue robots based on the ad hoc network includes a dispatch center and two (the number is not limited) search and rescue robots (robot A, robot B). The dispatch center uses PC and windows system. Search and rescue robot motor driver: 2-way PWM waveform duty cycle 8% to 12%, 60HZ.
[0014] The dispatch center has an ad hoc network device, and the dispatch center transmits data and control information through the ad hoc network device.
[0015] The search and rescue robot has a sub-ad hoc network device, a network module, a conversion module, and a waveform signal generator, and the sub-ad hoc network device, the network module, the conversion module, and the waveform signal generator of the robot are connected in sequence. The ad hoc network communication is realized between the primary ad hoc network device and the secondary ad hoc network device.
[0016] The network module is a se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More