

Six-degree-of-freedom wave compensation marine ultra-long mechanical arm
A wave compensation and robotic arm technology, applied in the field of robotic arms, can solve the problems of limited working space, inaccessibility, limited extension length, etc., and achieve the effects of large working space, good stability and high safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Exemplary embodiments of the present invention will be described in detail below with reference to the accompanying drawings. The same reference numbers in the figures indicate functionally identical or similar elements. While various aspects of the embodiments are shown in drawings, the drawings are not necessarily drawn to scale unless specifically indicated.
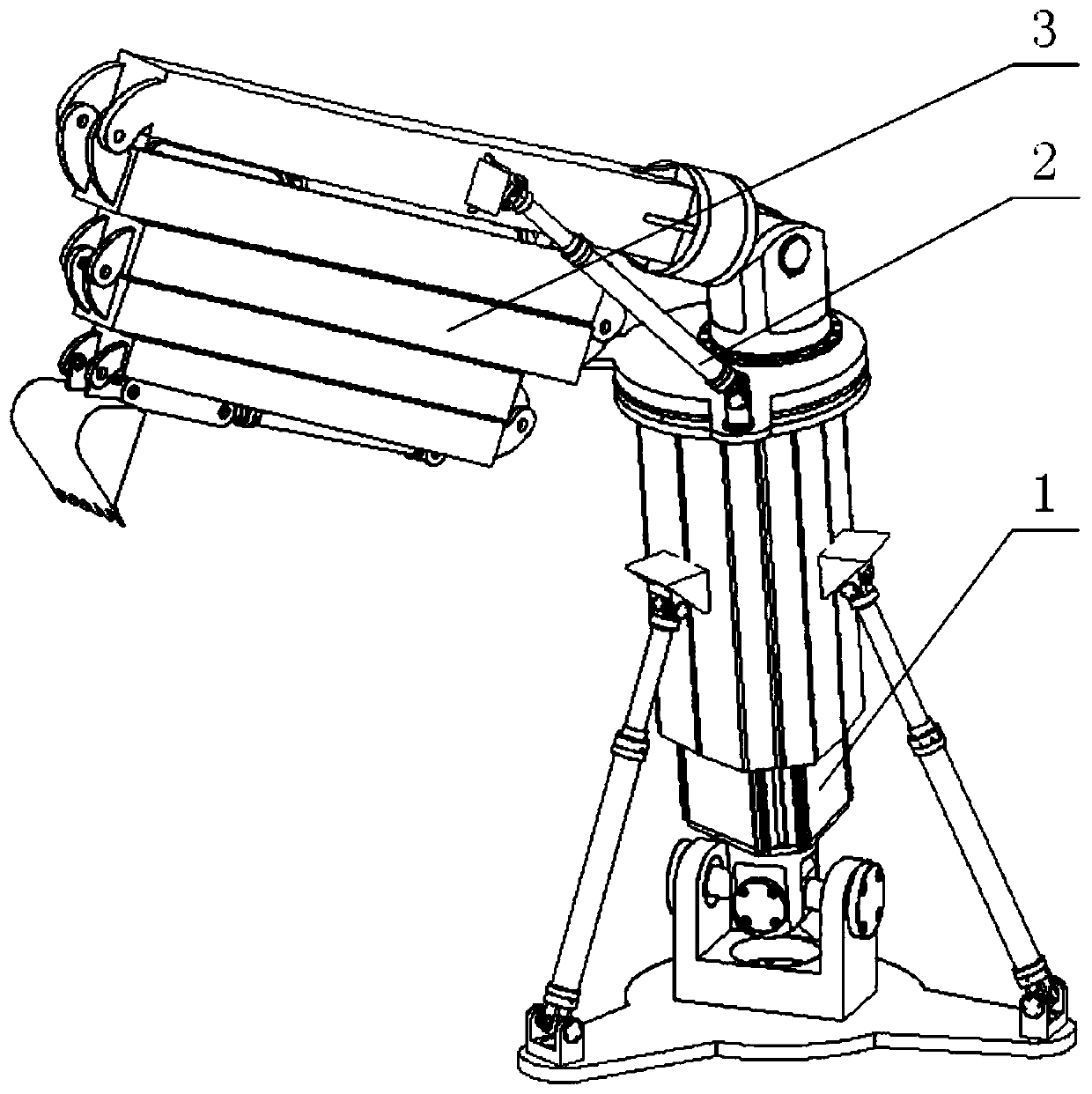
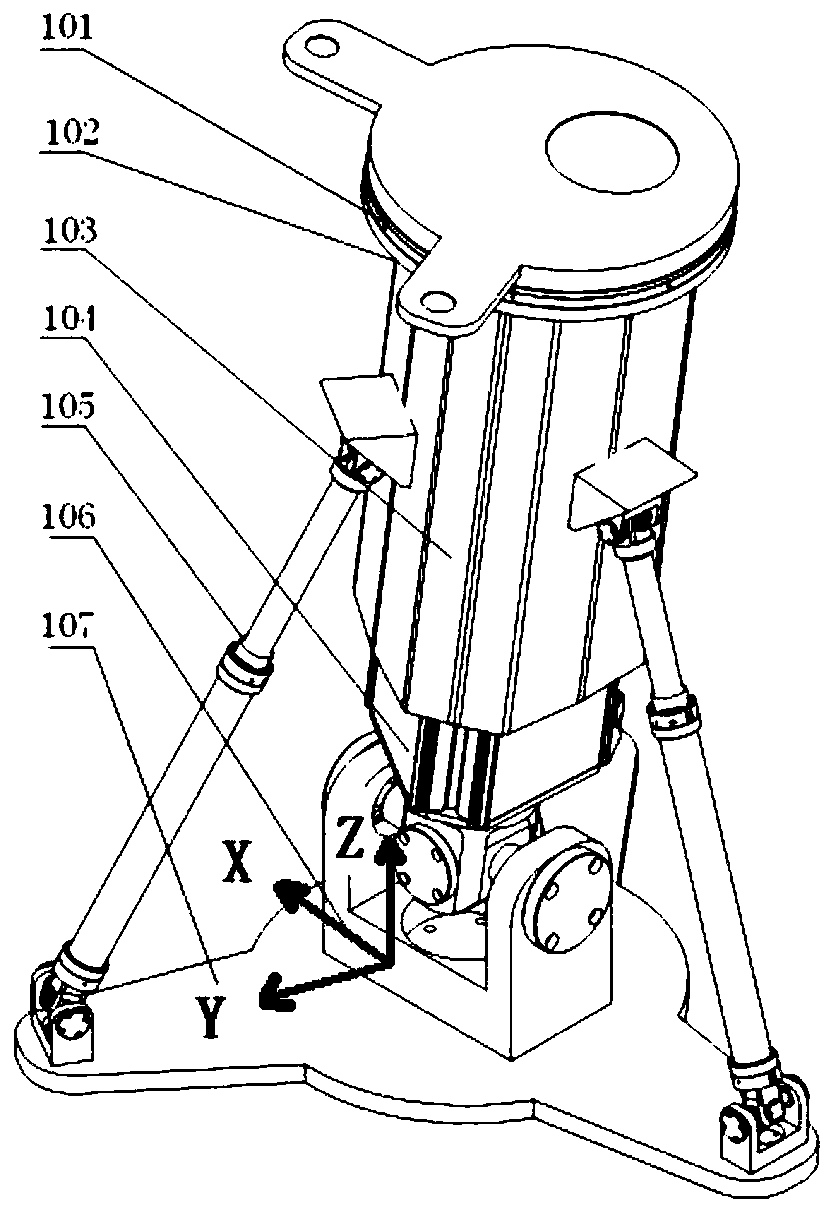
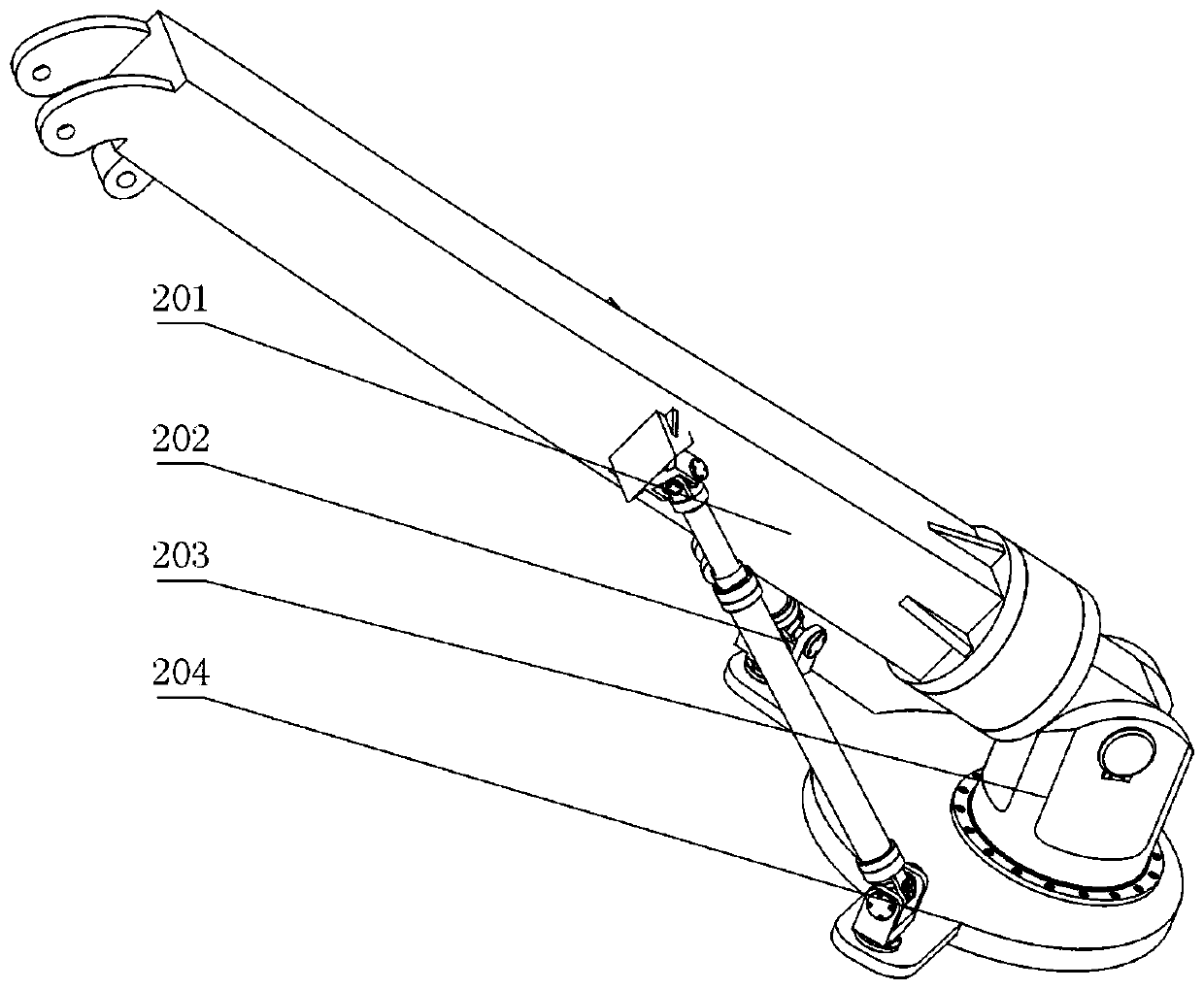
[0029] Such as figure 1 As shown, a marine super-long manipulator with six degrees of freedom wave compensation includes a compensable lifting platform 1, a parallel compensation manipulator 2 and a series manipulator 3. The compensable lifting platform 1 is a lifting device based on a parallel mechanism, which can Realize the movement of the whole device along the Z-axis direction and the rotation around the Z-axis, and have a compensation function; the parallel compensation mechanical arm 2 is installed on the compensable lifting platform 1 to realize the pitching and rotation around itself of the first sect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More