

Obstacle detection method based on multi-line laser radars
A technology of obstacle detection and multi-line laser, which is applied in the direction of radio wave measurement system, measurement device, electromagnetic wave re-radiation, etc., can solve the problems of low accuracy, difficulty in the real position of the vehicle, and difficulty in overcoming light changes, etc., to improve safety performance and high detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
[0021] The above-mentioned obstacle detection method based on multi-line laser radar comprises the following steps:
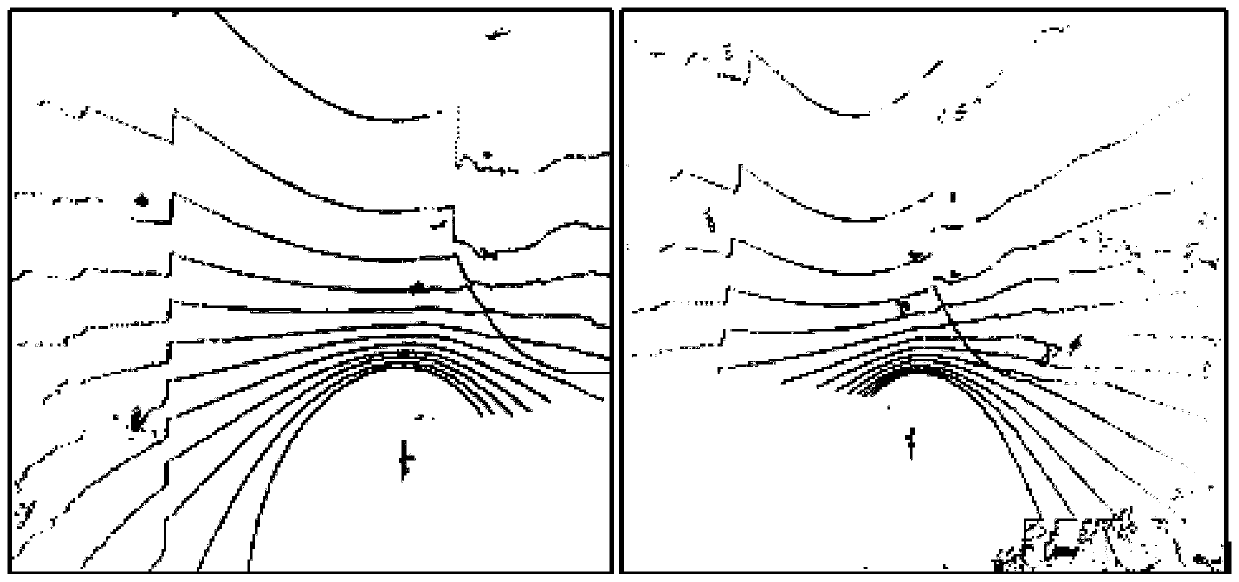
[0022] (1) Multi-line laser radars are respectively installed on the left front and right front of the vehicle, and each multi-line laser radar is used to collect laser point cloud data around the vehicle; One multi-line laser radar is installed respectively, and the laser point cloud data map collected by two multi-line laser radars is shown in figure 1 shown.
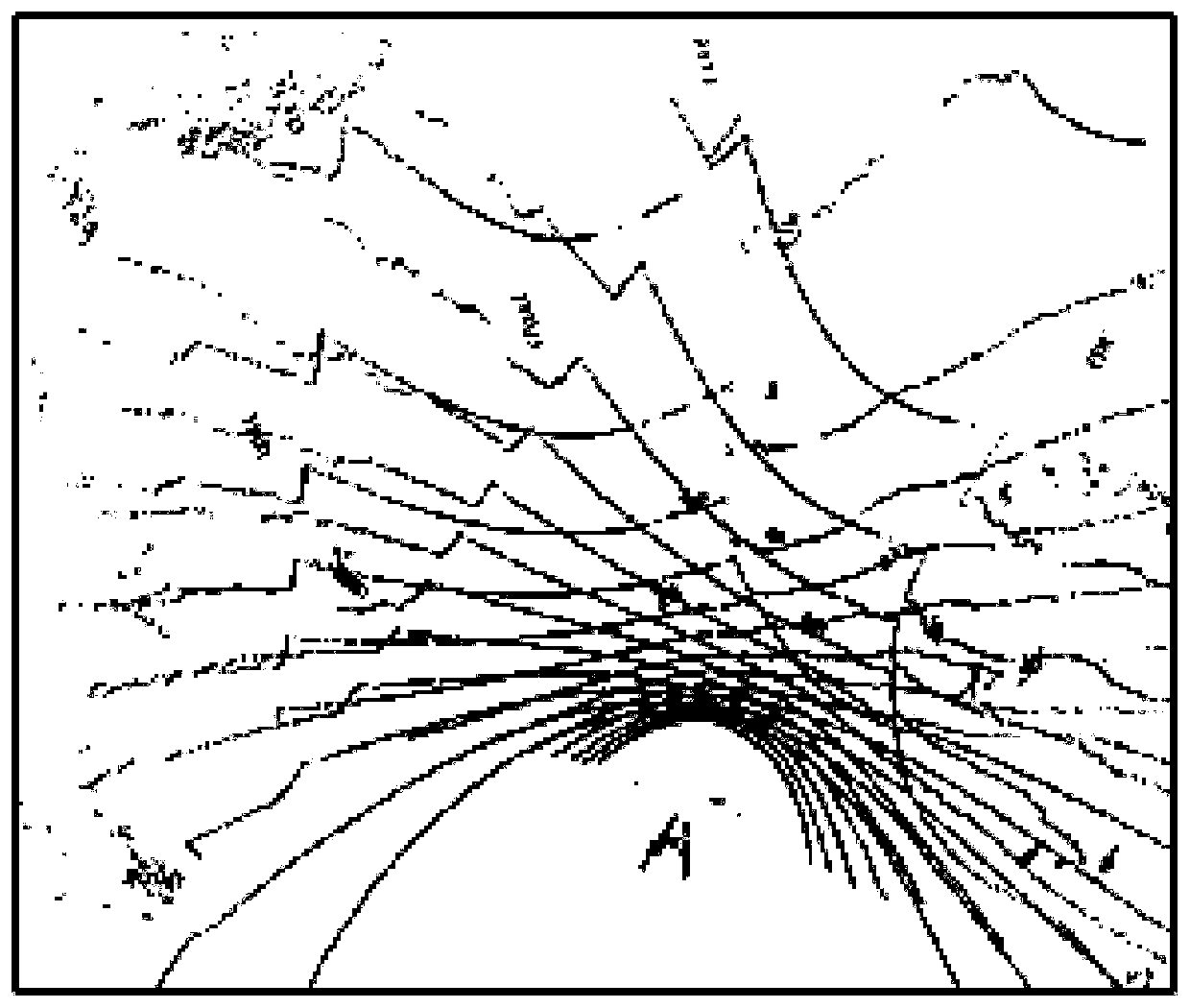
[0023] (2) see figure 2 shown, attached figure 1 The schematic diagram of direct superimposition of two sets of laser point cloud data, it can be seen that when the two sets of laser point cloud data are directly superimposed together, they do not overlap at all and cannot be used. Therefore, it is necessary to transform the two sets of laser point cloud data into...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More