

Multi-steering-wheel cooperative control method for omnidirectional mobile AGV
A collaborative control, omnidirectional movement technology, applied in electric controllers, non-electric variable control, control/regulation systems, etc., can solve problems such as force mismatch between gear trains, reduce asynchrony, improve motion accuracy and Operational efficiency, the effect of reducing internal force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
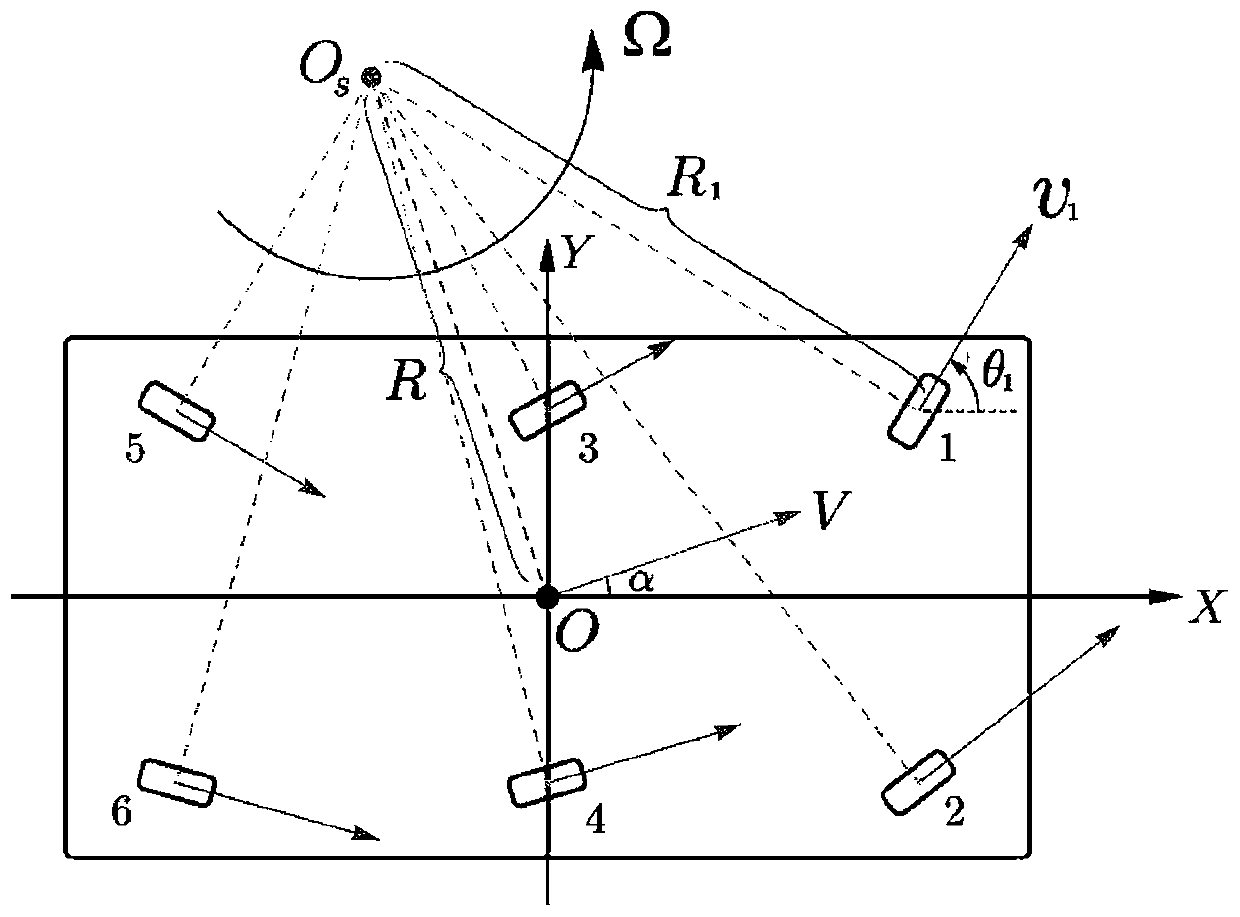
[0028] In order to make the purpose, technical solution and advantages of the present invention clearer, the technical solution of the present invention will be described in detail below taking an AGV with six steering wheels as an example. Apparently, the described embodiments are only some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other implementations obtained by persons of ordinary skill in the art without making creative efforts fall within the protection scope of the present invention.
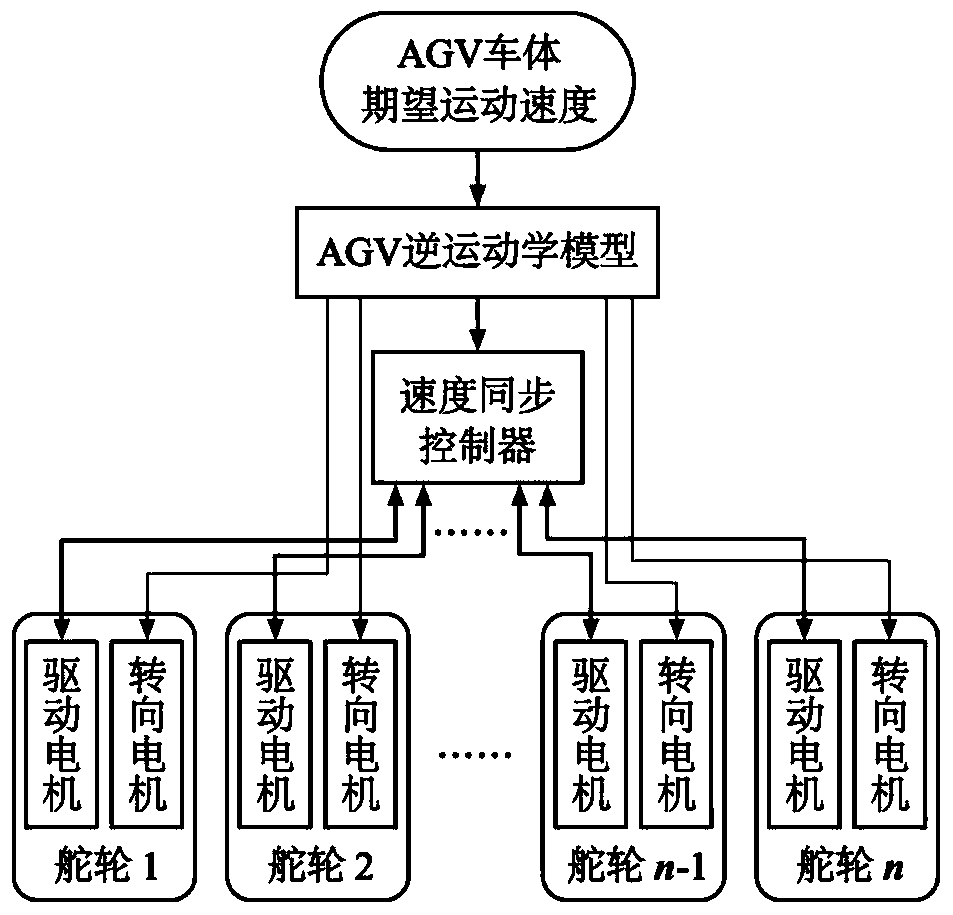
[0029] A wheel group cooperative motion control method for a steering wheel-driven AGV, the cooperative motion method obtains the driving and steering control quantities of each steering wheel through an inverse kinematics model and speed compensation, and controls the speed of the steering wheel drive motor and the steering motor The angular position control of the system effectively solves the problem of for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More