

The telescopic control system of the blanking rod of the plate-shaped workpiece hemming device
A wrapping device and telescopic control technology, which is applied in the direction of transportation and packaging, conveyor control devices, electrical components, etc., can solve the problems of manual wrapping operation of leakage, poor consistency of wrapping state, folds, etc., to overcome manual operation Unreliable, easy to mass produce, structured effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
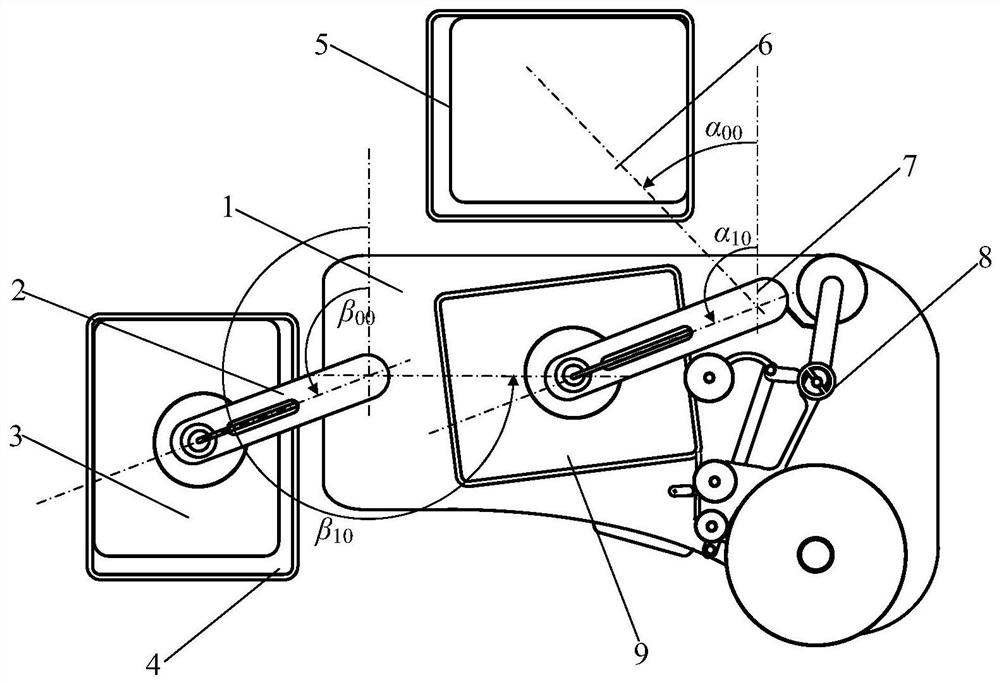
[0026] exist figure 1 In one embodiment of the present invention shown—the plate-shaped workpiece hemming method top view schematic diagram: the overall configuration described in the plate-shaped workpiece hemming method includes a base 1, a blanking mechanism 2, a package, a blanking car 4, Loading cart 5, items to be packaged 6, feeding mechanism 7, belt feeding mechanism 8 and packaged items 9. Abutment 1, as the main workbench, cabinet body and work and bearing surface of the overall device of the system, is located in the middle right of the workplace. The unloading mechanism 2 is used as a system device for grasping, transferring and lowering the package, and is assembled on the left end above the abutment 1 . The packaged piece 3 is the work object of the system device—the workpiece that has been hemmed is grasped, transferred, and lowered by the unloading mechanism 2, and placed in the unloading car 4 in turn. The unloading vehicle 4 is used as a transfer device for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More