

Coal mine inspection robot platform
A technology for inspection robots and platforms, which is applied in the directions of motor vehicles, elastic suspensions, suspensions, etc., to achieve the effect of simple structure and convenient application.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The specific implementation of the present invention will be described in detail below in conjunction with the accompanying drawings. As a part of this specification, the principles of the present invention will be described through examples. Other aspects, features and advantages of the present invention will become clear through the detailed description. In the figures referred to, the same or similar components in different figures are denoted by the same reference numerals.
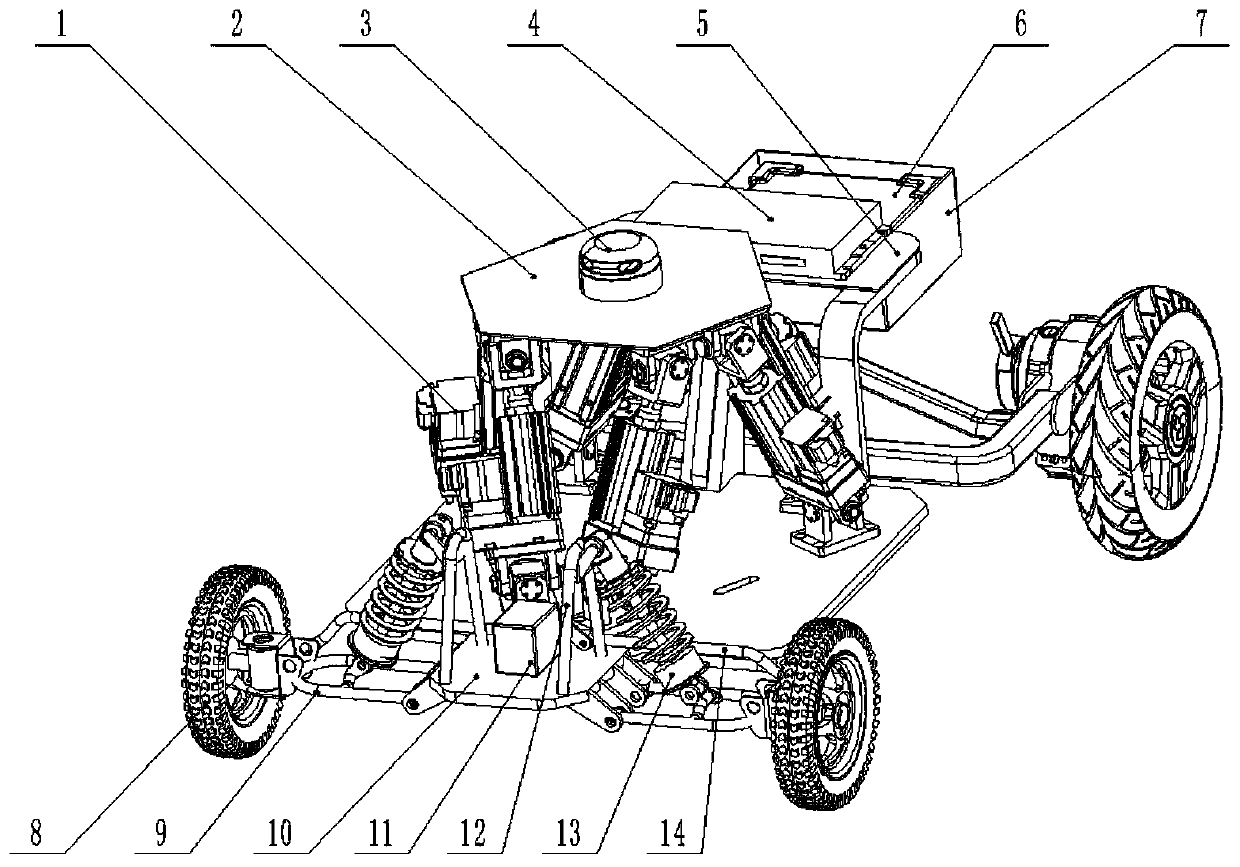
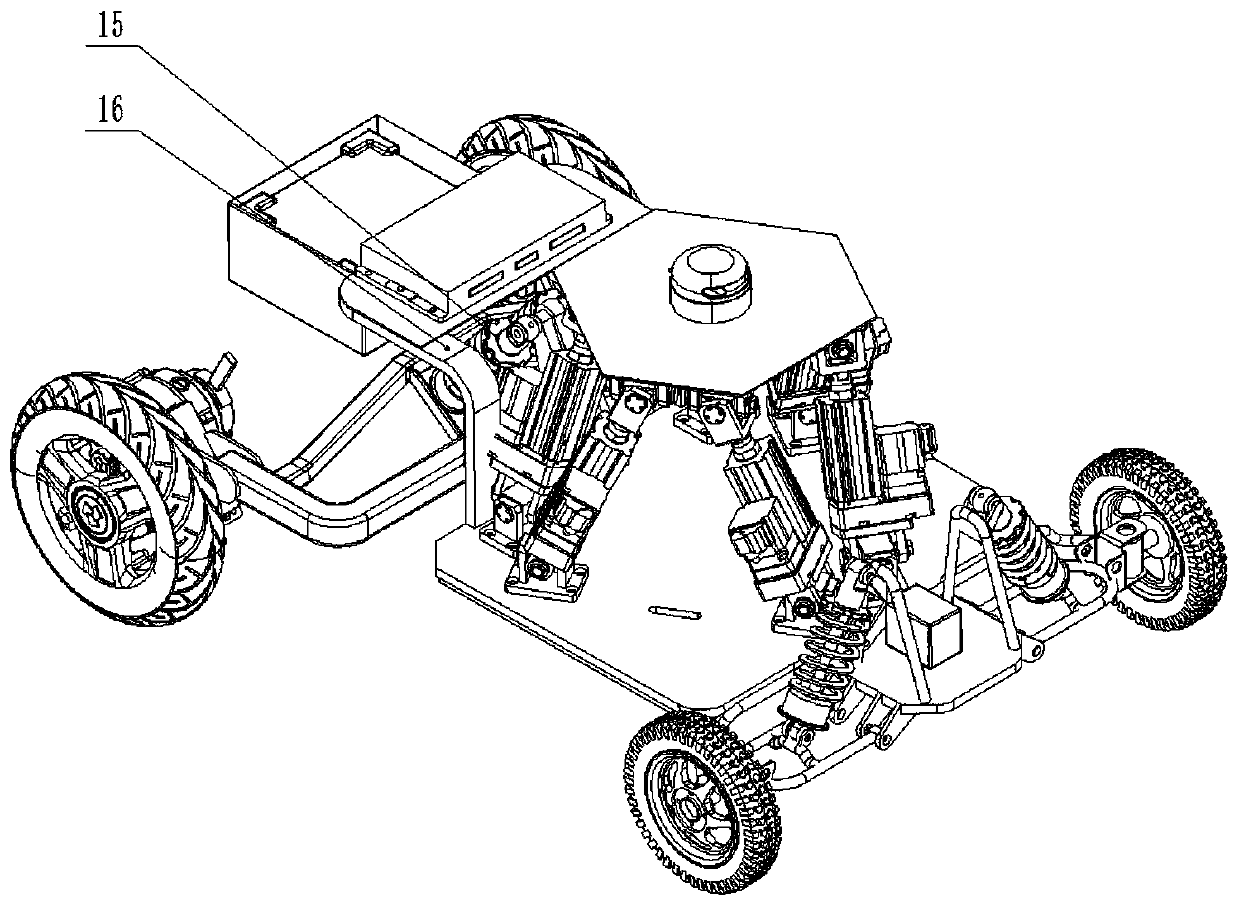
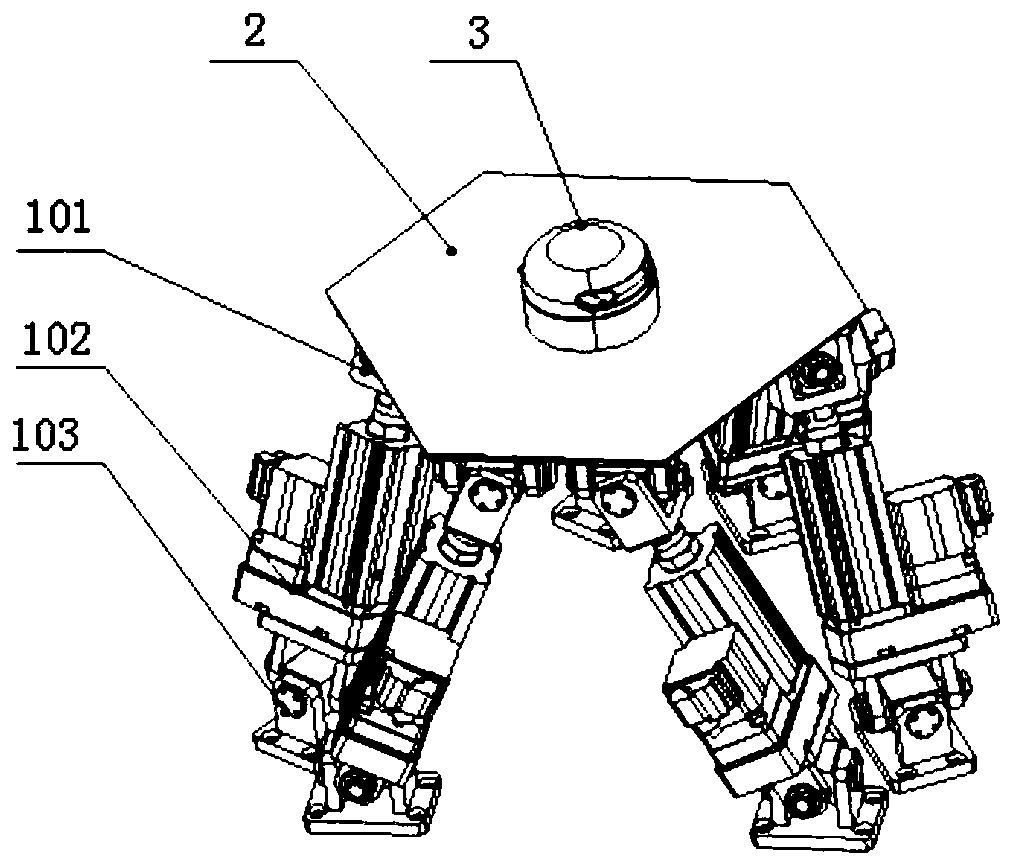
[0017] Such as Figure 1-4 As shown, the coal mine inspection robot platform provided by the present invention includes a six-degree-of-freedom platform 1, a top plate 2, a laser radar sensor 3, a controller 4, a controller board 5, a lithium battery 6, a battery placement box 7, a front wheel 8, and a front wheel 8. Wheel bracket 9, base plate 10, steering motor 11, front shock absorber connecting frame 12, front shock absorber spring 13, steering connecting rod 14, rear shock absorber spring ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More