

Deterministic mobile robot path planning method
A mobile robot and path planning technology, applied in the direction of instruments, road network navigators, measuring devices, etc., can solve the problem of premature search results of iterative search algorithms, instability, and failure to fundamentally solve the search space and search cost of one-time search algorithms, etc. problem, to achieve deterministic solution, improve correlation, and avoid partial continuous steering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] see Figure 1-12 , in an embodiment of the present invention, a method for path planning of a deterministic mobile robot, comprising the following steps:
[0052] Step 1. Evolve a rich immune mechanism in the immune system to adapt to external invasion in the actual environment;
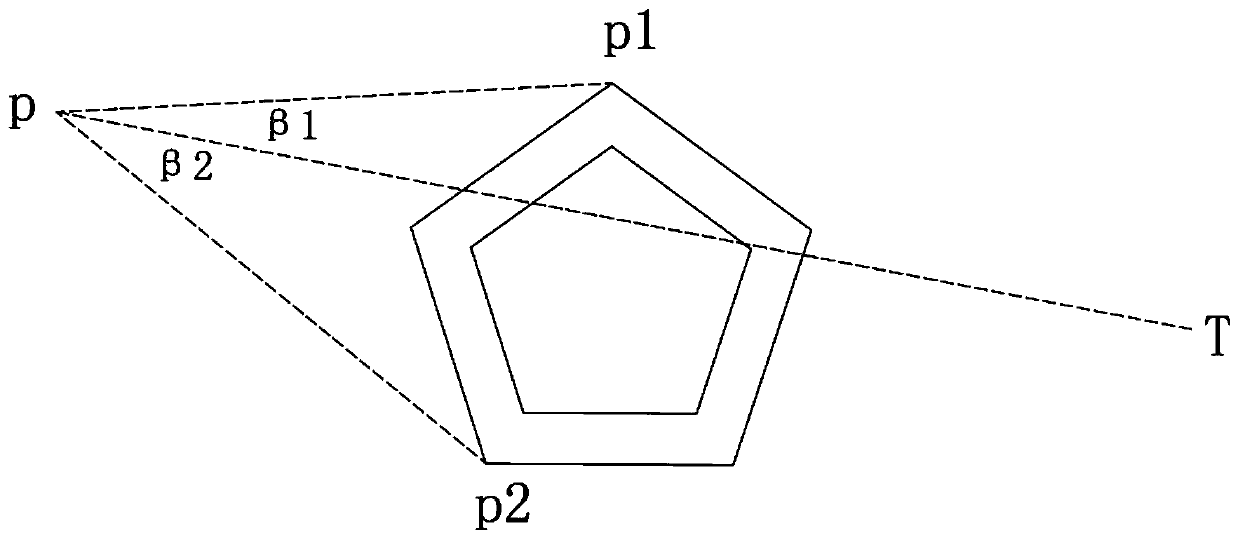
[0053] Step 2. According to the actual needs of robot path planning, improve the path fitness value function, increase the comprehensive penalty factor of path and angle, and prevent local continuous turning in the path;
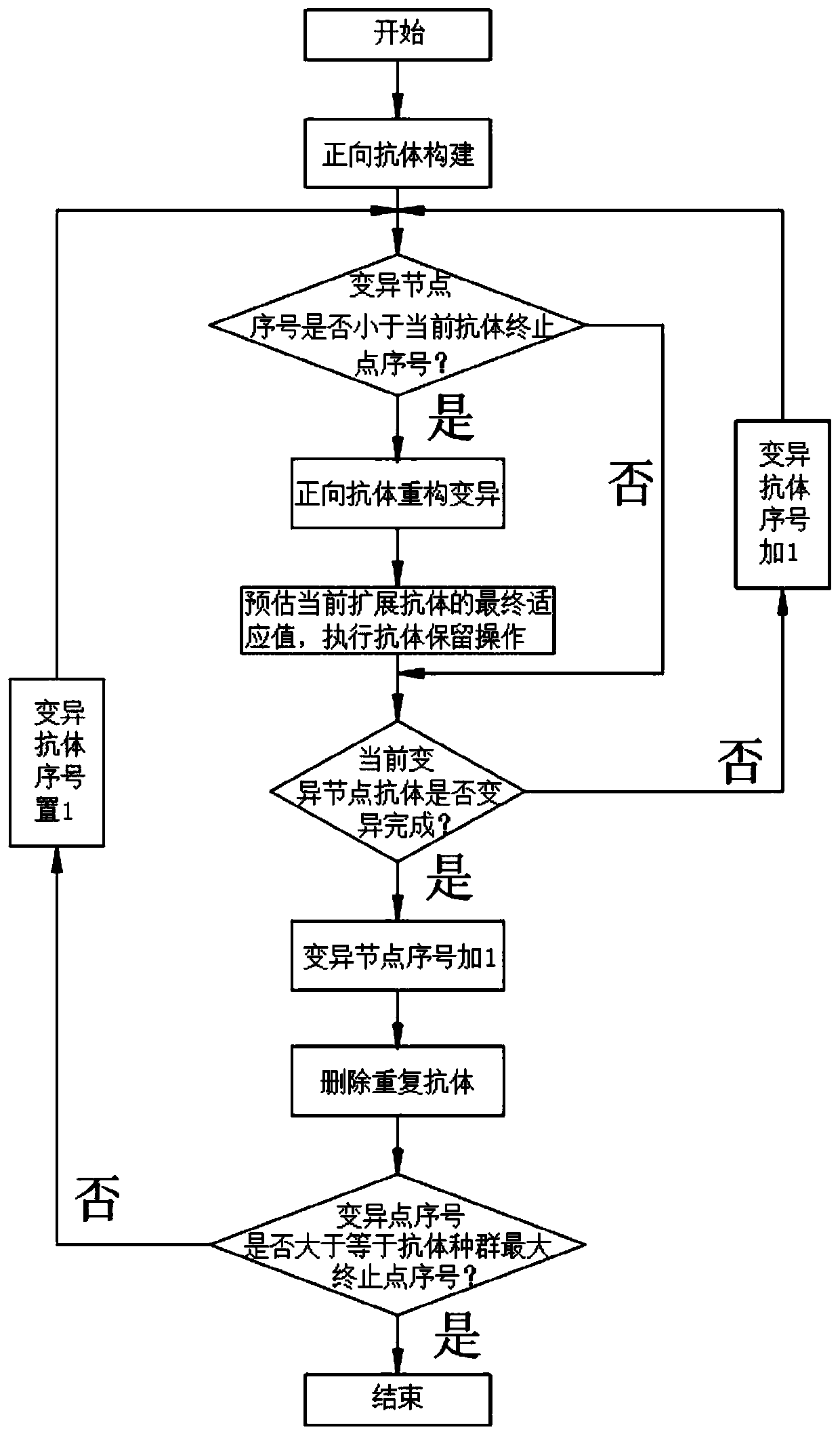
[0054] Step 3. Perform forward construction and reconstruction mutation operations on antibodies, avoid setting empirical parameters such as evolution algebra, antibody quantity, and mutation probability, and perform deterministic iterative search;
[0055] Step 4. Introduce the antibody remodeling promotion rate to estimate and screen the antibody fitness value.
[0056] Further, the immune mechanism in step 1 includes the following aspects:
[0057] A1. Genetic mechanis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More